Mục Lục thiết kế máy đếm và đóng gói đinh vít tự động
CHƯƠNG 1) TỔNG QUAN VỀ MÁY ĐẾM VÍT VÀ ĐÓNG GÓI VÍT TỰ ĐỘNG.. 2
1.1) Lịch sử phát triển của máy đếm vít và đóng gói vít2
1.1.1 Thực trạng máy đếm vít trên thế giới2
1.1.2 Thực trạng máy đếm vít trên thế giới3
1.2) Phân tích và lựa chọn phương án thiết kế máy. 5
1.2.1 Lựa chọn phương án thiết kế máy. 5
1.2.2 Phân tích và lựa chọn phương án câp phôi.5
1.3 Thiết kế sơ bộ máy đếm vít16
1.3.1 Thông số đầu vào. 16
1.3.2 Hệ thống cơ khí.17
CHƯƠNG 2) TÍNH TOÁN, THIẾT KẾ MÁY ĐẾM VÍT VÀ ĐÓNG GÓI TỰ ĐỘNG.. 21
2.1) Nguyên lý hoạt động và sơ đồ hoạt động của máy đếm vít21
2.1.1) Sơ đồ hoạt động của máy. 21
2.1.2) Nguyên lý hoạt động. 21
2.2) Tính toán thiết kế năng suất làm việc của máy. 22
2.2.1) Năng suất làm việc của máy. 22
2.3) Tính toán, thiết kế hệ thống truyền động cơ khí25
2.3.1) Phễu rung. 26
2.3.2) Tính toán lực quán tính của tang quấn. 30
2.3.3) Lực ma sát tại các cặp ổ lăn trên trục đỡ cuộn bao, các trục trung gian (7 trục), trục cán mép (2 trục) và trục hàn bao. 31
2.3.4) Lực ma sát tại cặp ổ trượt trên trục cuốn. 31
2.3.5)Lực ma sát sinh ra giữa bao và các bộ phận tạo hình. 31
2.3.6) Lực ma sát sinh ra giữa bao và phễu cấp liệu. 32
2.3.7) Trọng lượng của bao vít chưa cắt33
2.3.9) Hao phí trên hộp giảm tốc. 33
2.3.10) Hệ thống thiết bị sử dụng khí nén của máy. 34
2.3.12) Hệ thống nhiệt của máy. 34
2.4) Thiết kế sơ bộ bản vẽ chế tạo máy đếm vít và đóng gói35
2.4.1) Khung máy. 35
2.5) Quy trình lắp giáp và vận hành. 49
2.5.1) Sơ đồ bóc tách máy. 49
2.5.2) Quy trình vận hành máy. 49
CHƯƠNG 3) LẬP QUY TRÌNH CÔNG NGHỆ GIA CÔNG CHI TIẾT. 51
3.1) Quy trình công nghệ gia công gối đỡ UCP. 51
3.1.1) Xác định đường lối công nghệ. 51
3.1.2) Chọn phương pháp gia công.51
3.1.3) Bản vẽ lồng phôi52
3.1.4) Lập tiến trình công nghệ. 52
3.1.5) Tính toán thiết kế đồ gá. 74
CHƯƠNG 4) KẾT LUẬN.. 83
4.1:Kết quả đạt được.83
4.1.1 Hệ thống cơ khí:83
4.1.2 Hệ thống điều khiển.83
4.1.3 Về phía bản thân:83
4.2: Hạn chế.83
TÀI LIỆU THAM KHẢO.. 84
LỜI MỞ ĐẦU
Hiện nay, lĩnh vực sản xuất tự động hóa ngày càng phát triển rất nhanh chóng. Nhiều công ty đã bắt đầu ứng dụng các loại thiết bị khoa học công nghệ vào quy trình sản xuất để góp phần nâng cao năng suất và hiệu quả lao động. Và một trong những loại máy được ứng dụng nhiều nhất ở thời điểm hiện tại chính là máy đếm và đóng gói vít tự động. Hệ thống của đề tài sử dụng các cảm biến, các cơ cấu cơ khí và hệ thống giám sát để điều khiển, giám sát, xử lí các tín hiệu từ các cảm biến. Nhằm cải thiện công sức nhân công thực hiện đếm thủ công, và tránh được sự cố sai sót.
Là một đề tài lớn, khá khó khăn và thách thức, trong khuôn khổ của một đồ án tốt nghiệp. Bên cạnh đó do hạn chế về khả năng và kinh nghiệm cộng với lượng kiến thức lớn của đồ án nên trong quá trình thực hiện chắc chắn sẽ có những sai sót và không được như mong muốn. Nhưng nhóm em tin tưởng vào khả năng phát triển thực tiễn của đề tài trong cuộc sống và cũng tạo được bước tiền đề để phát triển các nghiên cứu khoa học kĩ thuật hỗ trợ con người trong lĩnh vực phát triển hiện đại.
Do thời gian có hạn nên cũng không thể tránh khỏi những sai sót trong quá trình làm đề tài. Nhóm mong được những ý kiến đóng góp của thầy cô và các bạn để có thể hoàn thiện đề tài tốt hơn.
CHƯƠNG 1) TỔNG QUAN VỀ MÁY ĐẾM VÍT VÀ ĐÓNG GÓI VÍT TỰ ĐỘNG
1.1) Lịch sử phát triển của máy đếm vít và đóng gói vít
1.1.1 Thực trạng máy đếm vít trên thế giới
Thiết bị đếm vít tự động thường bắt gặp trong các nhà máy chế tạo vít, bulong…, hoặc ở các nhà máy sản xuất các sản phẩm cần lắp ráp bằng vít với những hình dạng và kích thước khác nhau.
Một số loại máy đếm vít có trên thị trường:
Hình 1.1: Máy đếm vít KLD-Pro xuất xứ từ Trung Quốc.
Bảng 1.1: Thông số kỹ thuật máy đến vít KLD-Pro
|
Cung cấp điện |
AC110-240V |
|
Chiều dài vít |
Đếm được các loại vít có chiều dài < 20mm |
|
Kích thước máy |
125x180x150mm |
|
Trọng lượng tịnh |
3,25 kg |
Ưu điểm: nhỏ, gọn, dễ dàng vận hành, giá thành phải chăng.
Nhược điểm: Công suất thấp.
Ngoài ra trên thị trường còn có các loại máy đếm vít, ốc.. cùng một lúc và kết hợp đóng gói.
Hình 1.2: Máy đếm vít ( đinh, ốc,..) và đóng gói.
Tốc độ đóng gói: 20-55 túi/phút.
Điện áp: 380V.
Công suất: 1500W.
Ưu điểm: Công suất cao, kết hợp đếm nhiều loại óc, vít,……cùng một lúc.
Nhược điểm: Giá thành cao, máy chiếm diện tích lớn.
1.1.2 Thực trạng máy đếm vít trên thế giới
Hiện nay nước ta đang phát triển theo hướng công nghiệp hóa hiện đại hóa, những thiết bị máy móc dần thay thế cho con người. Nhiều nhà máy đã thay thế việc đếm vít thủ công bằng các thiết bị đếm vít tự động hiện đại, nhưng phần lớn các nhà máy lại tồn tại việc đếm vít thủ công do quy mô sản xuất nhà máy nhỏ và giá thành các thiết bị hiện đại
thì quá cao.
Hình 1.3: Đếm vít thủ công.
Các loại máy đếm vít ở nước ta hiện nay:
Hình 1.4: Máy đếm vít xuất xứ từ Việt Nam.
Máy đếm vít và đóng gói bằng hệ thống cấp phôi dạng rung được thể hiện trong (Hình 1.4). Hệ thống cấp phôi dạng rung bao gồm hai thành phần chính là phễu rung và thanh rung. Phễu rung dựa trên nguyên tắc điều khiển lực từ trường của nam châm điện kết hợp phản lực của lò xo lá để tạo thành lực li tâm xoay cùng chiều hoặc ngược chiều kim đồng hồ. Các chi tiết trong phễu sẽ tự động di chuyển theo các đường dẫn qua các bẫy. Những chi tiết không sắp xếp theo ý muốn sẽ rơi trở lại đáy phễu, phần còn lại vượt qua được bẫy sẽ đi ra ngoài cửa phễu đến thanh rung. Thanh rung chuyển các chi tiết đã được sắp xếp đúng trật tự đến cơ cấu chờ hoặc tách sản phẩm.
Ưu điểm: Phù hợp với hầu hết các chi tiết nhỏ, hiệu suất làm việc cao và bền.
Nhược điểm: Gây ra tiếng ồn do chi tiết va vào phễu, khó chế tạo và giá thành cao.
1.2) Phân tích và lựa chọn phương án thiết kế máy
1.2.1 Lựa chọn phương án thiết kế máy
Phương án thiết kế máy đếm vít và đóng gói bằng hệ thống cấp phôi dạng rung là hợp lý nhất vì các lý do sau:
- Yêu cầu đặt ra của máy khi thiết kế: máy đếm vít 15 (túi/phút), (Một túi từ 5 đến 10 SP).
- Máy phù hợp với các chi tiết nhỏ, hiệu suất làm việc cao.
- Có thể đếm nhiều loại vít cùng một lúc.
1.2.2 Phân tích và lựa chọn phương án câp phôi.
A, Phôi rời
Phôi rời là loại phôi sử dụng phổ biến trong quá trình sản xuất hàng loạt và hàng khối, là loại phôi đa dạng về hình dáng, phong phú về chủng loại và kích thước. Vì vậy, việc phân loại phôi rời có ý nghĩa rất lớn trong lựa chọn các cơ cấu cấp phôi. Ở đây, phôi rời là chi tiết có dạng chữ T và là dạng chi tiết có một trục đối xứng.
B, Cấu tạo chung của hệ thống cấp phôi rời
Hệ thống cấp phôi đầy đủ cần phải có các thành phần sau đây:
- Phễu chứa phôi hoặc ổ chứa phôi
- Máng dẫn phôi
- Cơ cấu định hướng phôi
- Cơ cấu điều chỉnh tốc độ phôi
- Cơ cấu bắt – nắm phôi khi gá đặt và tháo chi tiết sau khi gia công.
Mỗi thành phần trong hệ thống có một chức năng và nhiệm vụ nhất định và phải được bố trí đồng bộ với nhau trong một thể thống nhất về không gian và thời gian. Tuy vậy cũng phải thấy rằng không nhất thiết lúc nào cũng phải có đầy đủ các thành phần của nó mà tùy thuộc vào từng trường hợp cụ thể mà chỉ cần một trong số chúng. Việc phân chia hệ thống thành các thành phần như trên chỉ mang tính chất tương đối vì người ta có thể kết hợp với một số thành phần trong chúng lại với nhau theo đặc điểmvề hình dáng, kích thước của phôi để giảm được kích thước của hệ thống, làm cho việc thiết kế, chế tạo và lắp ráp đơn giản hơn.
C, Lựa chọn phương án cấp phôi rời.
Ta chọn phương án cấp phôi dạng bát rung vì những lý do sau:
- Cấp phôi thuộc dạng phôi rời từng chiếc cho một máy tự động.
- Phễu đơn giản dễ gia công và giá thành để thi công không cao.
- Dễ dàng trong việc điều tiết phôi.
- Cấp phôi đáp ứng được năng suất đề ra.
- Cấu tạo:
D, Cấu tạo, nguyên lý hoạt động của bát rung.
Hình 1.5: Cấu tạo bát rung
1: Phễu
2: Máng xoắn
3: Lò xo lá
4: Phần ứng từ của nam châm điện
5: Đế nam châm
6: Phần cảm ứng từ của nam châm điện
7: Vít
8: Đế
9: Giảm chấn
- Nguyên lý hoạt động:
Phôi là chi tiết dạng rời rạc được cấp vào phễu. Khi cấp nguồn cho phần cảm từ 6 của nam châm điện, nó sẽ tạo ra dao động kéo phễu đi xuống, nhưng nhờ có lò xo lá nên khi hệ thống dao động cốc phễu vừa chuyển động lên xuống và vừa xoay quanh tâm nó một góc rất nhỏ. Phôi đang nằm hỗn độn trong phễu sẽ tản ra xung quanh thành phễu và bắt đầu tiếp cận với đầu mối của cánh xoắn, phôi sẽ chuyển động theo cánh xoắn từ dưới đáy phễu lên trên theo mặt phẳng nghiêng cho tới khi ra khỏi phễu. Phôi nằm trong máng xoắn vít sẽ trượt hoặc bay tùy thuộc vào biên độ dao động và góc nghiêng a của các chân. Trong quá trình dao động phôi chịu tác dụng của lực ly tâm nhờ đó mà nó được chuyển lên phía trên ra khỏi phễu rung.
E, Định hướng phôi rời.
a) Giới thiệu về định hướng phôi rời
Trong quá trình tự động cấp phôi rời định hướng phôi là một vấn đề quan trọng nhất và cũng khó khăn nhất. Hình dáng, kích thước, trọng lượng của phôi quyết định khả năng tự định hướng của nó và quyết định phương pháp định hướng của hệ thống cấp phôi. Trong các cơ cấu cấp phôi rung động thì việc định hướng phôi xảy ra trong quá trình chuyển động của nó theo máng xoắn vít.
Có 2 phương pháp định hướng phôi là:
- Chủ động: tất cả các phôi được định hướng không phụ thuộc vào vị trí của chúng ở trong máng xoắn vít.
- Thụ động: chỉ có những phôi có vị trí chính xác mới được chuyển vào vị trí tiếp nhận, còn những phôi có vị trí không chính xác sẽ bị rơi trở về phễu chứa. Để cho việc thiết kế hệ thống cấp phôi dễ dàng thì việc định hướng phôi thường tuân thủ các nguyên tắc sau đây:
- Phải tạo điều kiện cho phôi tự nhận lấy vị trí ổn định tự nhiêncuar nó trong quá trình chuyển động.
- Tìm cách thu nhận lấy những phôi có vị trí đúng và gạt bỏ hoặc sửa chữa những phôi có vị trí sai
- Những phôi bị gạt bỏ phải được vận chuyển ngược trở lại phễu cấp phôi.
- Nếu cơ cấu định hướng có độ tin cậy không cao thì cần bổ sung vài ba cơ cấu trên đường vận chuyển phôi.
b) Thiết kế cơ cấu định hướng.
|
Vị trí 2 Định hướng phôi |
|
Vị trí 1 Loại phôi sai trạng thái |
|
Trạng thái E |
|
Trạng thái D |
|
Trạng thái C |
|
Trạng thái B |
|
Trạng thái A |
Hình 1.6: Các trạng thái phôi nguyên liệu
Sơ đồ lưu chuyển phôi nguyên liệu trong phễu rung.
|
Bát rung |
|
Trạng thái A |
|
Trạng thái B |
|
Trạng thái C |
|
Trạng thái D |
|
Trạng thái E |
|
Vị trí 2 Định hướng phôi |
|
Máng dẫn phôi |
|
Vị trí 1 Loại phôi sai trạng thái |
F, Máng dẫ phôi.
Máng dẫn phôi là bộ phận quan trọng của hệ thống cấp phôi. Nó có nhiệm vụ dẫn phôi từ phễu tới vị trí gia công hoặc từ vị trí gia công tới bộ phận tích trữ phôi cho giai đoạn tiếp theo. Như vậy, máng dẫn phôi có mặt từ lúc cấp phôi cho đến thành phẩm được tạo ra. Tùy theo hình dáng và kích thước cũng như trọng lượng của phôi mà có các loại kết cấu máng tương ứng. Các loại máng có kết cấu ở hình 1.7 dùng cho các chi tiết có trọng lượng nhỏ, phôi có thể lăn hoặc trượt trên đáy máng không sợ bị hư hỏng bề mặt của phôi. Khi phôi có trọng lượng lớn và cần bảo vệ bề mặt phôi ta giảm diện tích tiếp xúc giữa phôi và máng dẫn hoặc gắn các con lăn trên đáy máng.
HÌnh 1.7: Các loại máng dẫn phôi
- Hình a, b, c, d là máng chữ nhật dùng cho các chi tiết trụ có l/d < 3.5 và các chi tiết dẹt có chiều dày nhỏ hơn đường kính nhiều lần.
- Hình e là máng chữ T dùng cho các chi tiết trụ có mũ dạng bu long.
- Hình f: máng chữ V,
- Hình g: máng chữ C dùng cho các chi tiết trụ có l/d > 3.5.
- Hình i: máng chữ U có rãnh dùng cho các chi tiết có mũ theo phương pháp đổphôi vào máng.
- Hình j: máng chữ T ngược dùng cho các phôi có dạng hơn nữa hình trụ.
- Hình k: máng một thanh.
- Hình l: máng hai thanh.
- Hình m: máng một thanh treo.
- Hình n: máng hai thanh đỡ.
Trong thực tế, người ta thường sử dụng trọng lượng của chính chi tiết cấp phôi để định hướng và di chuyển phôi trong máng đến vị trí gia công haylắp ráp
Hình 1.8: Phôi di chuyển trên máng dẫn nhờ trọng lượng
Chi tiết cần cấp phôi của đề tài có dạng chữ T 1 trục đối xứng cho nên ta chọn máng dẫn phôi là máng dẫn 2 thanh như hình sau:
Hình 1.9: Cấu tạo máng dẫn phôi sử dụng trong đề tài
G, Hệ thống đếm vít
a, Xi lanh khí nén
Hình 1.10: Xi lanh khí nén
- Xi lanh khí nén là gì ?
Xi lanh khí nén hay còn gọi là ben khí nén, xi lanh khí là một thiết bị cơ học, sử dụng sức mạnh của khí nén để tạo ra lực cung cấp cho chuyển động. Xi lanh khí nén giúp chuyển hóa năng lượng của khí nén thành động năng, tác dụng làm piston của xi lanh chuyển động, thông qua đó truyền động đến thiết bị hoạt động. Bởi vì khí nén có khả năng nở rộng, không có sự xuất hiện của năng lượng đầu vào từ bên ngoài. Để thực hiện chức năng của mình, khí nén dãn nở ở áp suất lớn hơn áp suất khí quyển, áp lực được tạo ra đẩy piston chuyển động theo hướng mong muốn
- Cấu tạo của xi lanh khí nén.
Xi lanh khí nén có cấu tạo gồm các bộ phận chính như sau:
+ Thân trụ (barrel)
+ Piston
+ Trục piston (piston rod)
+ Lỗ cấp khí (cap-end port)
+ Lỗ thoát khí (rod-end port)
Hình: 1.11: Cấu tạo xi lanh khí nén
- Phân loại xi lanh khí nén
Trên thị trường có rất nhiều loại xi lanh khí nén khác nhau về mẫu mã, chủng loại, xuất xứ. Những loại xi lanh khí nén dưới đây là những loại xi lanh phổ biến nhất.
- Xi lanh khí nén 1 chiều
Xi lanh khí nén 1 chiều hay còn gọi là xi lanh khí nén tác động đơn. Loại xi lanh khí nén này sử dụng khí nén để dịch chuyển piston theo một hướng chuyển động nhất định. Piston trở về vị trí ban đầu nhờ lực tác động của lò xò hoặc một lực đẩy từ bên ngoài. Khi quan sát xi lanh khí nén 1 chiều, bạn có thể thấy chúng có 1 lỗ cấp nguồn khí nén và lỗ thoát khí nén trên thân. Thông thường, khi sử dụng xi lanh khí nén 1 chiều, người ta sử dụng van điện từ khí nén 3/2 (van điện từ 3 cửa 2 vị trí) để điều chỉnh dòng khí nén.
Xi lanh khí nén 1 chiều có 2 dạng cơ bản:
+ Xi lanh khí nén kiểu piston
+ Xi lanh khí nén kiểu màng.
-Xi lanh khí nén 2 chiều
Xi lanh khí nén 2 chiều hay còn gọi là xi lanh khí nén tác động kép. Đây là loại xi lanh khí nén có cơ cấu dẫn động ở cả 2 đầu. Xi lanh khí nén 2 chiều sử dụng lực đẩy của khí nén để tác động đẩy ra và rút lại. Lực đẩy piston được sinh ra từ cả 2 phía, bởi vậy cấu tạo của xi lanh khí nén 2 chiều có 2 lỗ để cung cấp khí nén. Với loại xi lanh khí nén 2 chiều này, người ta sử dụng van điện từ loại 4/2, 5/2 hoặc 5/3 để điều chỉnh lưu lượng khí nén.
Đặc điểm nổi bật của hầu hết xi lanh khí nén 2 chiều là cần piston chỉ có ở 1 phía, vì vậy kích thước 2 đầu piston khác nhau dẫn đến lực tác dụng lên cần của piston khác nhau hoàn toàn. Trên thị trường hiện nay có 2 loại xi lanh khí nén 2 chiều:
+ Xi lanh khí nén 2 chiều không có đệm giảm chấn
+ Xi lanh khí nén 2 chiều có đệm giảm chấn, có thể điều chỉnh được hành trình
-Xi lanh khí nén 2 chiều đồng bộ là loại xi lanh có cần piston ở cả 2 phía, diện tích 2 mặt bằng nhau, lực sinh ra ở 2 phía gần như hoàn toàn bằng nhau.
- Trong đề tài, tai lựa chọn xi lanh khí nén 2 chiều có đệm giảm chấn.
b, Cảm biến tiệm cận.
- Cảm biến tiệm cận là gì?
Hình 1.12: Cảm biến tiệm cận
Cảm biến tiệm cận (còn được gọi là “Công tắc tiệm cận” hoặc đơn giản là “PROX” tên tiếng anh là Proximity Sensors) phản ứng khi có vật ở gần cảm biến. Trong hầu hết các trường hợp, khoảng cách này chỉ là vài mm. Cảm biến tiệm cận thường phát hiện vị trí cuối của chi tiết máy và tín hiệu đầu ra của cảm biến khởi động một chức năng khác của máy. Đặc biệt cảm biến này hoạt động tốt ngay cả trong những môi trường khắc nghiệt.Cảm biến tiệm cận chuyển đổi tín hiệu về sự chuyển động hoặc xuất hiện của vật thể thành tín hiệu điện. Có 3 hệ thống phát hiện để thực hiện công việc chuyển đổi này: hệ thống sử dụng dòng điện xoáy được phát ra trong vật thể kim loại nhờ hiện tượng cảm ứng điện từ, hệ thống sử dụng sự thay đổi điện dung khi đến gần vật thể cần phát hiện, hệ thống sử dụng nam châm và hệ thống chuyển mạch cộng từ.
- Đặc điểm của cảm biến tiệm cận.
+ Phát hiện vật thể không cần tiếp xúc, không tác động lên vật, khoảng cách xa nhất tới 30mm.
+ Hoạt động ổn định, chống rung động và chống shock tốt.
+ Tốc độ đáp ứng nhanh, tuổi thọ cao so với công tắc giới hạn (limit switch).
+ Đầu sensor nhỏ có thể lắp ở nhiều nơi.
+ Có thể sử dụng trong môi trường khắc nghiệt
|
Xi lanh đếm vít |
|
Xi lanh ngắt vít |
|
Cảm biến đếm vít |
|
Cảm biến phát hiện vít |
Hình 1.13 Cấu tạo bộ phận đếm vít
Sơ đồ động học
|
Cảm biến phát hiện vít |
|
Bát rung |
|
Cảm biến đếm vít |
|
Xi lanh đếm vít |
|
Xi lang ngắt vít |
H, Cơ cấu đóng gói.
a, Ống dẫn vít.
Hình: 1.14 ống dẫn vít.
Ống dẫn vít có tác dụng dẫn vít vào túi đựng vít, tạo hình cho túi đựng vít.
b, Cơ cấu hàn miệng túi nylon
- Cơ cấu hàn miệng túi là gì?
Cơ cấu hàn miệng túi là giúp hàn miệng túi, niêm phong, bảo quản kín cho sản phẩm bên trong
- Đặc điểm của cơ cấu hàn miệng túi.
- Cơ cấu hàn nhiệt dọc.
+ Cấu tạo: Gồm ba phần chính là xi lanh chuyền động, bảng điều khiển và trở nhiệt.
Hình 1.15 Cơ câu hàn nhiệt dọc
+ Nguyên lý hoạt động: Cục điện trở nhiệt nóng lên ⇒ Truyền nhiệt sang thanh hàn ⇒ Khi túi tiếp thanh nhiệt và bị ép lại chúng sẽ kết dính với nhau.
- Cơ cấu hàn nhiệt ngang.
+ Cấu tạo: Gồm 4 phần chính là xi lanh chuyền động, bảng điều khiển, thanh trở nhiệt và lưỡi cắt
Hình 1.16: cơ cấu hàn nhiệt ngang
+ Nguyên lý hoạt động: Cục điện trở nhiệt nóng lên ⇒ Truyền nhiệt sang thanh hàn ⇒ Khi túi tiếp thanh nhiệt và bị ép lại chúng sẽ kết dính với nhau đồng thời lưỡi cắt cắt miệng túi.
1.3 Thiết kế sơ bộ máy đếm vít
1.3.1 Thông số đầu vào
Hình 1.17 Thông số đinh vít
|
Loại |
|
Unit: mm |
||||||||||
|
d |
p |
dk |
k |
L |
S |
|
||||||
|
Max |
Min |
Max |
Min |
Metric |
Max |
Min |
|
|||||
|
I |
M2 |
0.4 |
3.89 |
3.62 |
2.00 |
1.89 |
20 |
1.5 |
1.58 |
1.52 |
|
|
|
II |
M3 |
0.5 |
5.68 |
5.32 |
3.00 |
2.86 |
20 |
2.5 |
2.58 |
2.52 |
|
|
1.3.2 Hệ thống cơ khí.
A, Sơ đồ động học.
|
Bát rung |
|
Máng dẫn |
|
Hệ Thống đếm vít |
|
Hướng di chuyển của vít |
|
Phễu dẫn vít |
|
Hệ thống đóng gói |
Hình 1.18: Sơ đồ động học của máy
- Bát Rung: Bát rung hay còn gọi là phễu, bát rung hoạt động liên tục. Bát rung có nhiệm vụ định hướng và đưa phôi nguyên liệu ra máng dẫn nhờ rảnh xoắn và quá trình rung của phễu.
- Máng dẫn: Trong đề tài, ta sử dụng máng dẫn hải thanh. Nó có nhiệm vụ dẫn phôi từ phễu tới vị trí gia công hoặc từ vị trí gia công tới bộ phận tích trữ phôi cho giai đoạn tiếp theo.
- Hệ thống đếm vít: Là hệ thống sử dụng các xi lanh kết hợp các cảm biến tiệm cận có tác dụng đếm đúng số lượng đinh vít yêu cầu trước khi chuyển sang công đoạn sau.
- Phễu dẫn vít: Phễu dẫn vít làm nhiệm vụ tiếp nhận đinh vít từ hệ thống đếm vít chuyển đến hệ thống đóng gói. Ngoài ra, phễu dẫn vít có tác dụng định hình cho túi đựng vít.
- Hệ thống đóng gói: Là hệ thống bao gồm các cơ cấu hàn và cắt nylon. Nhiệm vụ chính của hệ thống là tiếp nhận đinh vít từ phễu dẫn vít và đóng gói đinh vít nhờ vào các cơ cấu hàn và cắt nylon.
B,Hệ thống sử dụng hệ điều khiển plc.
a) Sơ đồ khối.
Hình 1.6 Sơ đồ khối hệ thống điều khiển bằng PLC
PLC sẽ nhận tín hiệu cài đặt từ hệ thống điều khiển ng và tín hiệu t cảm biến để điều PLC xử lý các tín hiệu đó thông qua chương trình lập trình để điều khiển các động cơ dẫn động và hiển thị số sản phẩm đã qua băng chuyền lên màn hình LCD.
b) Sơ đồ kết nối sơ bộ
Hình 1.7 Sơ đồ kết nối sơ bộ
c) Ưu nhược - điểm của PLC.
Sự ra đời của hệ điều khiển PLC đã làm thay đổi hẳn hệ thống điều khiển cũng như các khái niệm thiết kế về chung, hệ điều khiển PLC có những ưu điểm sau:
PLC Nút nhấn Cảm biến Màn hình LCD Động cơ băng tải
– Giảm đến 80% số lượng dây nối.
– Công suất tiêu thụ của PLC rất thấp .
– Khả năng tự chuẩn đoán do đó gi p cho việc sửa chữa đƣợc nhanh chóng và dễ dàng.
– Chức năng điều khiển thay đổi dễ dàng bằng thiết bị lập trình, khi không có các yêu cầu thay đổi các đầu vào ra thì không cần phải nâng cấp phần cứng
– Giảm thiểu số lƣợng rơle và timer so với hệ điều khiển cổ điển.
– Không hạn chế số lƣợng tiếp điểm sử dụng trong chƣơng trình.
– Thời gian để một chu trình điều khiển hoàn thành chỉ mất vài ms, điều này làm tăng tốc độ và năng suất PLC .
– Chương trình điều khiển có thể được in ra giấy chỉ trong thời gian ngắn thuận tiện cho vấn đề bảo trì và sửa chữa hệ thống.
– Chức năng lập trình dễ dàng, ngôn ngữ lập trình dễ hiểu, dễ học.
– Kích thước nhỏ gọn, dễ dàng bảo quản, sửa chữa.
– Dung lượng chương trình lớn để có thể chứa được nhiều chương trình phức tạp.
– Hoàn toàn tin cậy trong môi trƣờng công nghiệp.
– Dễ dàng kết nối đƣợc với các thiết bị thông minh khác nhau: máy tính, kết nối mạng Internet, các Modul mở rộng.
– Độ tin cậy cao, kích thước nhỏ.
– Giá bán cạnh tranh.
Đặc trong của tất cả các dòng PLC bất kì là khả năng có thể lập trình được, chỉ số IP ở dải quy định cho phép PLC hoạt động trong môi trường khắc nghiệt công nghiệp, yếu tố bền vững thích nghi, độ tin cậy, tỉ lệ hư hỏng rất thấp, thay thế và hiệu chỉnh chương trình dễ dàng, khả năng nâng cấp các thiết bị ngoại vi hay mở rộng số lượng đầu vào nhập và đầu ra xuất được đáp ứng tuỳ nghi trong khả năng trên có thể xem là các tiêu chí đầu tiên.
C, Kết luận
Như vậy, máy đếm vít bao gồm các phần tử sau:
- Bát rung.
- Máng dẫn hai thanh.
- Cảm biến tiệm cận.
- Xi lanh khí nén có giảm trấn.
- Phễu dẫn vít.
- Cơ cấu hàn túi nylon.
CHƯƠNG 2) TÍNH TOÁN, THIẾT KẾ MÁY ĐẾM VÍT VÀ ĐÓNG GÓI TỰ ĐỘNG
2.1) Nguyên lý hoạt động và sơ đồ hoạt động của máy đếm vít
2.1.1) Sơ đồ hoạt động của máy
Hình 2.1 Sơ đồ hoạt động của máy
2.1.2) Nguyên lý hoạt động
Phễu rung động chứa vít quay tròn quy cơ cấu cấp vít đưa vít xuống hệ khay chứa xếp vít. Tại đây có các cảm biến phát hiện vít và đến vít, xi lanh khí nén chia và xi lanh khí nét chặn vít. Sau khi vít được đếm sẽ được đưa đến phếu chứa
và bắt đầu được đóng gói. Sản phẩm hoàn thiện được đưa ra ngoài nhờ hệ thống bẳng tải đằng trước máy.
2.2) Tính toán thiết kế năng suất làm việc của máy
2.2.1) Năng suất làm việc của máy
A, Năng suất cấp phôi của bát rung.
Phễu rung phải cung cấp lượng phôi liên tục cho máy và bảo đảm năng suât công nghệ (năng suất thực tế của máy) vì thế năng suất yêu cầu của phễu phải lớn hơn năng suất công nghệ khoảng 1.3 lần.
Tốc độ vận chuyển chi tiết theo máng của cơ cấu cấp phôi rung động:
Trong đó chọn các thông số:
l = 0,023m là chiều dài chi tiết theo phương chuyển động (chiều dài chi tiết)
K1 = 1,3 : hệ số tăng vận tốc để đảm bảo máy làm việc liên tục
K2 : hệ số đặc trưng cho độ nhặt chi tiết trên đường vận chuyển
Stb : Khe hở trung bình giữa các chi tiết.
Thông thường: Stb = 0,2d => Stb = 0,2.0,3 = 0,6mm
K3 = 0,333: hệ số chi tiết được định hướng
- m: Số trạng thái được định hướng đúng : m = 1 (chỉ lấy các chi tiết có mặt đế lớn ở phía dưới)
- n : Tất cả các trạng thái của chi tiết có trên máng : n = 3: (chi tiết có 3 trạng thái trên máng)
Năng suất của máy :15 gói/phút .
Suy ra để hoàn thành một sản phẩm ( gói vít ) ta cần 4s
Chọn sơ bộ vận tốc động cơ là 1420 vòng/phút .
Để thuận lợi trong tính toán và thiết kế ta chọn chu vi con lăn cuốn bằng chiều dài bao tức là bằng 195 mm . Vì vậy đường kính con lăn cuốn bao sẽ là :
dcc = 0,195/ = 62,07 mm
Lấy dcc = 62 mm . Sai số sẽ được bù trừ bằng hệ thống bù sai số hoạt động theo một encoder đo góc .
Đường kính con lăn hàn bao :
dch = 76 mm .
Vận tốc dài của bao là :
v = 15×0,195 = 2,925 m/ph = 0,049 m/s
Vận tốc quay nhỏ nhất của cuộn bao (ứng với đường kính lớn nhất là dc = 450 mm):
vòng/phút .
Vận tốc quay lớn nhất của cuộn bao (ứng với đường kính nhỏ nhất khi hết bao là dc = 125 mm):
vòng/phút .
Vận tốc quay của các trục căng bao và trục cán nếp (có đường kính giống nhau dt = 28 mm)
vòng/phút
Vận tốc quay của con lăn hàn bao (đường kính dch = 76 mm)
vòng/phút
Trục của encoder không gắn trực tiếp vào trục của con lăn cuốn bao mà đuợc truyền qua một bộ truyền bánh lăn với tỷ số truyền ue = 5 . Vậy vận tốc của trục encoder là
ne = 15×5 = 75 vòng/phút.
B,Thông số hình học của phễu của máng.
Thông số hình học:
tg = f2.tg (2.4)
=arctg f2.tg=0,352.tg150
=1,80
Chọn =1,5°
Trong đó:
• f = 0,35: hệ số ma sát tỉnh giữa phối và máng
- ( =15°): góc nghiêng tối ưu của nhíp (thép lá)
Chọn đường kính của phễu D= 400 (mm)
Chiều dày thành phễu 2 (mm)
Bước xoắn của máng là:
t= .D.tg = 3,14 x 400x tg1,50 = 32.9 (mm) (2.5)
Chiều rộng của cánh xoắn là:
B=r + (2 - 3) = 17,4 + 2,6 = 20 (mm) (2.6)
Trong đó:
• r: là đường kính lớn nhất của phôi
Cánh xoắn được làm bằng thép CT3 có độ dày là 2 (mm)
Dung lượng E của phễu phải có khả năng chứa được số chi tiết đủ cho máy làm việc trong khoảng thời gian là: tmax= 4 (giờ) = 240 (phút)
E =60 x 240 = 14400 (chi tiết) (2.7)
Số chi tiết z có khả năng được xếp thành một lớp trong phễu:
= 60 + = 80 (2.8)
Trong đó:
• ri = 1, 2, 3, 4: số lần đường kính phôi
• L: chiều dài của phôi
Số lớp phôi có khả năng được xếp cùng lúc trong toàn bộ dung lượng của phễu:
n= = 3 (lớp)
Chiều cao H của phễu
H=n.h. +A=3.31,6+47,4 = 205 (mm) (2.9)
Trong đó:
• hệ: chiều cao của chi tiết
• A (A=1,5. hc):chiều cao dự phòng của phễu Đáy phễu được làm bằng thép CT3 và được làm có hình con ngược 170° để khi đổ phội vào phễu, phôi sẽ lăn ra thành phễu và sẽ theo cánh xoắn đi lên khi hệ thống
dao động.
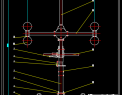
Hình 2.3 Kích thước sơ bộ của phễu rung
Đáy phễu gắn với lõi sắt, lõi sắt này được chế tạo từ 1 miếng thép có kích thước Ø = 250 (mm), h = 10 (mm)
Xác định khối lượng của phễu:
Chia phễu ra các phần đơn giản để tính khối lượng:
Mp =mt + mm +mo+md (2.10)
• Mp: khối lượng phễu
• mt: khối lượng thành phễu
• mm: khối lượng máng phễu
• md: khối lượng đày phễu
• mo: khối lượng đế phễu
Mp = mt + mm + md + mo = 4+1,47 +1,766 +3,826 = 11,062 (kg)
Khối lượng của tất cả chi tiết được chất lên phễu
me= 0,002.1380=2,76 (kg)
Khối lượng tổng của bát rung khi chứa vít
M 2,76 + 11,062 = 13,822 (kg)
2.3) Tính toán, thiết kế hệ thống truyền động cơ khí
Các lực tạo ra tải trọng trong quá trình vận hành máy bao gồm :
- Lực quán tính của cuộn bao.
- Lực ma sát tại các ổ lăn của : trục đỡ cuộn bao, các trục căng bao , cặp trục cán mép bao , hai cặp ổ lăn của cặp con lăn cuốn bao .
- Lực ma sát sinh ra trên các cặp ổ trượt : cặp ổ trượt của cặp con lăn dẫn bao, hai cặp ổ trượt của cặp con lăn hàn bao.
- Trọng lượng của một trục căng bao.
- Lực ma sát sinh ra giữa bao và bộ phận tạo hình (gồm bộ phận tạo hình ban đầu và bộ phận tạo hình chính).
- Lực ma sát sinh ra giữa phễu cấp liệu và bao.
- Trọng lượng của gói vít chưa cắt (lực này biến đổi theo chu kỳ).
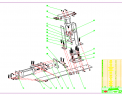
2.3.1) Phễu rung
Hình 2.4 Cấu tạo phễu rung
A, cấu tạo:
1: Phễu
2: Màng xoắn
3: Lò xo lá ( trong bản 3d a gọi là nhíp )
4: Phần ứng từ của làm châm điện
5: Đế nam châm điện,
6: Phần cảm ứng từ của nam châm điện,
7: Vít
8: Đế
9: Giảm chấn
Nguyên lý: Khi cấp nguồn cho phần cảm từ 6 của nam châm điện, nó sẽ tạo ra dao động kéo phễu đi xuống, nhưng nhờ có lò xo lá nên khi hệ thống dao động cốc phễu vừa chuyển động lên xuống, vừa xoay quanh tâm nó một góc rất nhỏ. Phôi đang nằm hỗn độn trong phễu sẽ tản ra xung quanh thành phễu và bắt đầu tiếp cận với đầu mối của cánh xoắn, phôi sẽ chuyển động theo cánh xoắn từ dưới đáy phễu lên trên theo mặt phẳng nghiêng cho tới khi ra khỏi phễu
- Ưu điểm:
+ Năng suất cao
+ Không kẹt phôi
+ Phổ biến trên thị trường
+ Kết cấu đơn giản
+ Dễ điều tiết phôi
- Nhược điểm:
+ Rung động
+ Gây ồn
B, Nguyên lý vận chuyển phôi trên máng xoắn vít
Để nghiên cứu cơ cấu cấp phôi kiểu rung động, người ta xét một hệ cơ cấu 4 khâu bản lề chuyển động lắc trong mặt phẳng nằm ngang hoặc nằm nghiêng