PHÂN TÍCH ĐẶC ĐIỂM CẤU TẠO, KHAI THÁC KỸ THUẬT VÀ ĐỀ XUẤT PHƯƠNG ÁN SỬ DỤNG PHANH ĐỘNG CƠ
DYNOmite-13 TẠI VIỆN NCCT TÀU THỦY - ĐHNT
MỤC LỤC...............................................................................................................1
LỜI NÓI ĐẦU .........................................................................................................1
Chương 1: TỔNG QUAN VỀ PHƯƠNG PHÁP VÀ THI ẾT BỊ ĐO CÔNG SUẤT ĐỘNG CƠ ĐỐT TRONG........................................................................................2
1.2 Tổng quan về phương pháp đo công su ất:.............................. ................................ ... 2
1.2.1 Phương pháp xác định công xuất loại cân bằng: .............................. ................. 3
1.2.2 Phương pháp xác đ ịnh công xuất động c ơ loại không cân bằng: .................... 4
1.2.2.1 Động cơ lai máy phát đi ện:.............................. ................................ .............. 4
1.2.2.2 Động cơ lai máy bơm: .............................. ................................ ..................... 5
1.2.2.3 Phương pháp xác đ ịnh công suất động c ơ bằng cách sử dụng xoắn kế: 5
1.2.3 Phương pháp đo côn g suất động cơ dùng trong chẩn đoán (thường dùng trong chẩn đoán trạng thái kỹ thuật củ a ôtô):.............................. ............................... 6
1.3 Tổng quan về thiết bị đo công s uất:.............................. ................................ ............... 8
1.3.1 Thiết bị gây tải: .............................. ................................ ................................ ......... 8
1.3.1.1 Phanh ki ểu cơ khí: .............................. ................................ ............................ 9
1.3.1.2 Phanh không khí: .............................. ................................ ........................... 10
1.3.1.3 Phanh thuỷ lực:.............................. ................................ ............................... 10
1.3.1.4 Phanh đi ện:.............................. ................................ ................................ ...... 12
1.3.2 Thiết bị cân lực: .............................. ................................ ................................ ...... 15
1.3.2.1 Thiết bị cân lực kiểu c ơ học:.............................. ................................ .......... 15
1.3.2.2 Thiết bị cân lực kiểu thuỷ lực v à khí nén: .............................. ................... 17
Chương 2: ĐẶC ĐIỂM CẤU TẠO PHANH ĐỘNG C Ơ DYNOmite-13 .................19
2.1 Nguyên lí ho ạt động chung: .............................. ................................ .......................... 19
2.2 Những bộ phận cấu th ành (danh nghĩa): .............................. ................................ ... 20
2.3.2 Bộ tua bin lưu lượng khí (Airflow turbine kits) :.............................. ................ 25
2.3.3 Tháp làm lạnh (Cooling Tower): .............................. ................................ ......... 28
2.3.4 Bộ tăng tải tự động điện tử (El ectronic Auto - Load Servo): .......................... 30
2.3.5. Bộ góp khí xả (Exhaust Gas Temp erature Kit): .............................. ............... 32
2.3.6 Bộ chuyển đổi lưu lượng nhiên liệu (Fuel Flow Transducer Kit): ................ 36
2.3.7 Bộ trích lọc cảm ứng RPM (Induc tive RPM Pick-Up):.............................. .... 38
2.3.8 Bộ cảm biến RPM/MPH trục Jack ( Jack-Shaft RPM/MPH Sensor Kit): .. 39
2.3.9 Bộ rơle công tắt ngắt (Kill Switch Relay Kit ): .............................. .................... 41
2.3.10 Bộ trích lọc điện từ RPM bộ hút thu (Magnetic Absorber RPM Pi ck-Up):
.............................. ................................ ................................ ................................ ............ 42
2.3.11 Bơm nư ớc di động (Rortable Water Pum p): .............................. ................... 43
2.3.12 Bộ chuyển đổi momen xoắn (Rotar y Torque Transducer): ........................ 44
2.3.13 Nối nguồn bản điều khiển (Power ing the console): .............................. ......... 45
2.3.14 Sự thu nhận dữ liệu - Kết nối cơ bản (Data acquisition – Basic hook-up): 47
2.3.15 Những đầu nối đồng hồ đo cho độn g cơ riêng biệt ( Engine Specific Tach
Típ): .............................. ................................ ................................ ................................ ... 48
2.3.16 Kết nối các phụ kiện: .............................. ................................ ........................... 49
2.3.17 Một số phụ kiện khác: .............................. ................................ ......................... 52
Chương 3: KHAI THÁC K Ỹ THUẬT PHANH ĐỘNG C Ơ DYNOmite-13 ............55
3.1 Yêu cầu cung cấp nước:.............................. ................................ ................................ 55
3.2 Phương pháp lắp đặt:.............................. ................................ ................................ .... 58
3.3 Hiệu chỉnh và cài đặt:.............................. ................................ ................................ .... 60
3.3.1 Chạy cài đặt: .............................. ................................ ................................ ........... 61
3.3.2 Cài đặt cấu hình: .............................. ................................ ................................ .... 66
3.3.3 Công suất:.............................. ................................ ................................ ................ 74
3.4 Bảo dưỡng:.............................. ................................ ................................ ...................... 76
3.4.1 Sự bôi trơn: .............................. ................................ ................................ ............. 76
3.4.2 Bao bọc –nút kín:.............................. ................................ ................................ .... 76
3.4.3 Ắc qui: .............................. ................................ ................................ ...................... 76
3.4.4 Ổ bi:.............................. ................................ ................................ .......................... 77
3.4.5 Phần mềm nâng cấp máy tính E -PROM: .............................. .......................... 77
3.4.6 Sự hiệu chỉnh lại: .............................. ................................ ................................ .... 78
3.4.7 Lắp đặt lại cánh tay đ òn lực: .............................. ................................ ................ 82
3.5 Vấn đề hỏng hóc .............................. ................................ ................................ ............. 84
3.5.1 Hỏi và trả lời.............................. ................................ ................................ ............ 84
3.5.2 Điều khiển tải tự động: .............................. ................................ .......................... 89
Chương 4: PHƯƠNG ÁN SỬ DỤNG PHANH ĐỘNG C Ơ DYNOmite-13..............92
4.1 Thực trạng phanh động c ơ DYNOmite-13 tại viện NCCT tàu thủy ĐHNT: ..... 92
4.2 Đề xuất một số ph ương án sử dụng: .............................. ................................ ........... 94
Phụ lục ..................................................................................................................97
TÀI LIỆU THAM KHẢO......................................................................................98
LỜI NÓI ĐẦU
Trong lĩnh vực động cơ đốt trong, khi thiết kế, chế tạo, sửa chữa, quản lí phương tiện việc kiểm tra công suất động cơ là không thể thiếu và có ý nghĩa đặc biệt quan trọng. Điều đó giúp sử dụng hiệu quả động cơ, duy tu bảo dưỡng hợp lí, kéo dài tuổi thọ giảm chi phí sửa chữa động cơ. Vì vậy cần một thiết bị đo công suất động cơ đốt trong đạt độ chính xác cao, nhanh chóng, kinh tế. Thiết bị đo công suất phanh thủy lực là một thiết bị đảm bảo được những yêu cầu trên. Đề tài “Phân tích đặc điểm cấu tạo, khai thác kĩ thuật và đề suất phương án sử dụng phanh động cơ DYNOmite-13 tại viện nghiên cứu chế tạo Tàu Thủy- Đại Học Nha Trang” cũng nhằm tìm hiểu, sử dụng hiệu quả loại phanh thủy lực này nhằm những mục đích trên. Nội dung nghiên cứu được trình bày theo 4 chương:
Chương 1: Tổng quan về phương pháp và thiết bị đo công suất động cơ đốt trong.
Chương 2: Đặc điểm cấu tạo phanh động cơ DYNOmite-13
Chương 3: Khai thác kĩ thuật phanh động cơ DYNOmite-13
Chương 4: Phương án sử dụng phanh động cơ DYNOmite-13
Tuy thời gian thực hiện đề tài kéo dài nhưng do khả năng còn hạn chế nên không tránh khỏi những thiếu sót về nội dung cũng như hình thức trình bày của đề tài. Vì vậy rất mong sự đóng góp của các thầy để đề tài hoàn thiện hơn.
Qua đây tôi xin bày tỏ lòng biết ơn chân thành đến thầy: PGS.TS Nguyễn Văn Nhận, các thầy trong khoa cơ khí cùng các thầy tại viện nghiên cứu đã giúp đỡ tôi hoàn thành đề tài tốt nghiệp này.
Chương1
TỔNG QUAN VỀ PHƯƠNG PHÁP VÀ THIẾT BỊ ĐO
CÔNG SUẤT ĐỘNG CƠ ĐỐT TRONG
1.1Tổng quát về công suất động cơ:
Công suất động cơ là một trong những thông số kỹ thuật cơ bản cuả động cơ được quan tâm nhiều nhất và nó là chỉ tiêu quan trọng không phụ thuộc vào công dụng và kiểu loại động cơ. Vì vậy trong thiết kế, chế tạo, sửa chữa và sử dụng, việc xác định chính xác công suất của động cơ luôn được coi trọng nhằm các mục đích sau:
Kiểm nghiệm động cơ trước khi xuất xưởng (nhằm kiểm tra động cơ sau khi
thiết kế có đạt chỉ tiêu công suất đề ra không).
Kiểm tra động cơ sau khi sửa chữa lớn.
Tổ chức khai thác động cơ hợp lí, an toàn và tin cậy.
Biết chiều hướng và các giá trị biến động công suất trong những điều kiện
khai thác cụ thể.
Giúp quản lí các phương tiện khác.
1.2 Tổng quan về phương pháp đo công suất:
Ngày nay việc xác định công suất động cơ có khá nhiều phương pháp và thiết bị nhưng phần lớn đều dựa vào momen quay và tốc độ quay. Để đơn giản có thể phân nhóm như sau:
Phương pháp xác định công suất có ích loại cân bằng.
Phương pháp xác định công suất có ích loại không cân bằng.
Phương pháp xác định công suất dùng trong chuẩn đoán.
1.2.1 Phương pháp xác định công xuất loại cân bằng:
Trong phương pháp này động cơ quay một thiết bị mà trục rôto của thiết bị được nối với trục của động cơ. Stato của thiết bị có dao động ngang được. Khi động cơ làm việc, nó sản sinh ra một momen xoắn làm cho rôto của thiết bị quay (tức là hãm lại chuyển động của động cơ) cần có một môi trường trung gian. Khi rôto tác dụng lên môi trường trung gian làm cho thân (stato) của thiết bị quay theo. Để giữ thân lại, người ta tìm cách tác dụng lên thân một lực (momen) hãm. Lực (momen) hãm được đo bằng một thiết bị khác gọi là thiết bị cân lực. Sơ đồ nguyên lí của phương
pháp được thể hiện bằng sơ đồ sau:
Động cơ (gây lực momen)
Thiết bị gây tải (cân bằng lực, momen)
Thiết bị cân lực
Đây là phương pháp được sử dụng rộng rãi trên các bệ thử của các nhà máy chế tạo động cơ, các cơ quan nghiên cứu. Phương pháp này thực chất là đo lực (momen) sau đó tính công suất theo công thức:
Ne n (Mx Mms Mf ) n ( P.l Mms Mf )
30 30
Mx: Momen xoắn thu được qua thiết bị đo (KN.m, KG.m,…)
n :Tốc độ quay của động cơ (không qua hộp số) P :Lực thu được trên thiết bị đo (KN, KG,…)
l: cánh tay đòn trên thiết bị gây tải
Mms: Momen ma sát của thiết bị đo ở các gối trục (KN.m, KG.m,…) Mf: Momen tổn hao trên thiết bị gây tải (KN.m, KG.m,…).
Người ta đưa giá trị của Mms, Mf vào trị số sai số cho phép, tuỳ theo từng thiết bị
cụ thể mà ta có được giá trị Mms, Mf khác nhau.
1.2.2 Phương pháp xác định công xuất động cơ loại không cân bằng:
Các thiết bị đo kiểu này có một số đặc điểm sau:
Động cơ cần xác định làm quay rôto của thiết bị, còn thân của thiết bị thì đứng yên, thiết bị này cho ta các thông số trên đồng hồ (vôn kế, ampe kế, áp kế…) từ đó tính toán ra công suất động cơ.
Các thiết bị này không có thiết bị cân lực kèm theo.
Đây là phương pháp xác định công suất động cơ tại nơi sử dụng. Dùng trong các loại động cơ công suất nhỏ. Đặc biệt có ý nghĩa quan trọng trong lĩnh vực tàu cá.
1.2.2.1 Động cơ lai máy phát điện:
Trục động cơ được nối với trục rôto của máy phát, khi động cơ làm việc, rôto quay quanh stato làm trong các cuộn dây stato xuất hiện một từ trường. Dưới tác dụng của từ trường, trong các đầu dây của phần ứng sẽ xuất hiện suất điện động cảm. Nếu mạch ngoài kín thì sẽ xuất hiện dòng điện trong mạch. Tuỳ theo máy phát điện một chiều hay xoay chiều mà ta sử dụng các thiết bị phù hợp để đo các thông số của nó. Nếu là máy phát xoay chiều thì công suất động cơ được tính bằng công
thức sau:
N U .I .m.cos .103
e
(KW)
d
N W .103
e
(KW)
d
Trong đó
UΦ, IΦ: giá trị điện áp và dòng điện xoay chiều mà máy phát tạo ra
W: giá trị đọc được trên oát kế (W)
m: số pha
ηd: hiệu suất truyền động
Cosφ: hệ số công suất máy phát điện
Đối với máy phát điện một chiều:
N U .I .10 3
e
(KW)
d
Trong đó
U, I: giá trị điện áp và dòng điện một chiều ηd: hiệu suất truyền động
1.2.2.2 Động cơ lai máy bơm:
Năng lượng của động cơ dùng để truyền cho máy bơm để đưa chất lỏng lên cao hoặt đi xa. Năng lượng dòng chất lỏng gồm hai thành phần : động năng ( v2/2g) và áp năng (p/γ) . Người ta căn cứ vào hai thành phần này để xác định công suất thuỷ lực hay động cơ.
Công suất thuỷ lực của bơm được xác định theo công thức:
Ntl=G.H=γ.Q.H
Trong đó
G = γ .Q : lưu lượng trọng lượng của bơm (N/s)
γ : trọng lượng riêng của chất lỏng (N/m3) Q : lưu lượng của bơm (m3/s)
H : cột áp của bơm (m)
Khi làm việc trong máy bơm thường xảy ra các tổn thất năng lượng bao gồm: tổn thất cơ khí, tổn thất thuỷ lực, tổn thất lưu lượng. Do đó công suất của động cơ lai máy bơm là:
η ck, ηtl, ηll: hiệu suất của hệ truyền động , thuỷ lực và lưu lượng.
1.2.2.3 Phương pháp xác định công suất động cơ bằng cách sử dụng xoắn kế:
Momen xoắn trên trục có thể được xác định thông qua biến dạng xoắn của trục
theo biểu thức:
Trong đó
(KG.m)
G: môđun đàn hồi của vật liệu chế tạo trục (KG/m2)
Jp: môđun quán tính độc cực của tiết diện trục
Lt: chiều dài đoạn trục cơ sở để đo góc xoắn (m)
Φt: góc xoắn giữa hai mặt cắt ở các mút đoạn trục cơ sở Lt (rad)
G.J
Đối với hệ trục cụ thể thì
p const , như vậy để xác định công suất động cơ
Lt
chỉ cần xác định Φt.Trên cơ sở này người ta chế tạo thiết bị xác định góc xoắn giữa hai mặt cắt của đoạn trục, nhờ đó xác định được momen xoắn. Công suất động cơ được xác định theo công thức:
Ne Me * Me * .n
30
Phương pháp này có độ chính xác cao và thường được dùng tại nơi sử dụng động cơ. Tuỳ theo phần tử cảm biến được dùng trong xoắn kế mà ta có các dạng xoắn kế sau : xoắn kế kiểu cảm biến điện , xoắn kế kiểu quang , xoắn kế kiểu cảm biến từ.
1.2.3 Phương pháp đo công suất động cơ dùng trong chẩn đoán (thường dùng trong chẩn đoán trạng thái kỹ thuật của ôtô):
Đo momen chủ động trên bánh xe:
- Áp dụng cho các động cơ lắp trên phương tiện vận tải
- Sử dụng thiết bị đo lực phanh trên bánh xe, từ đó tính được momen và công suất động cơ
Sai số chủ yếu của phương pháp là không biết chính xác hiệu suất của các bộ
truyềntrênxecầnđo.
Phương pháp đo không phanh: đây là phương pháp đơn giản vì không phải tháo động cơ ra khỏi xe. Người ta lợi dụng tổn thất cơ giới của các xi lanh không làm việc để làm tải cho xi lanh. Khi đo thanh răng ở vị trí cực đại (hoặc bướm ga mở hết ), đánh chết các xi lanh dùng làm tải, chỉ để lại một xi lanh làm việc đo tốc độ của động cơ, thời gian đo chỉ khoảng một phút. Lần lượt thay đổi các xi lanh khác và ghi kết quả số đo vòng quay.
Công suất động cơ sẽ được tính theo công thức:
Ne Nedm(1 N )
(ml)
Trong đó:
Nedm: công suất định mức của động cơ theo thiết kế (ml)
N : độ chênh công suất với động cơ thiết kế (%)
(n1Ne _ntb).k
N 100
n1Ne: số vòng quay của động cơ khi làm việc với một xi lanh khi ở tình trạng còn mới (theo tài liệu kỹ thuật)
ntb: số vòng quay trung bình của các xi lanh khi làm việc riêng rẽ (đo khi chẩn đoán)
k: hệ số kinh nghiệm
Đối với động cơ máy kéo k = 0.055
Đối với động cơ ôtô k = 0.02-0.04
Ví dụ: với động cơ D50 có 4 xi lanh, công suất định mức 55 mã lực, số vòng quay định mức khi làm việc với một xi lanh là 1370 v/phút. Hệ số k= 0.55, n1=1090 v/ph, n 2 = 1210 v/ph, n3=1215 v/ph, n4 =1105 v/ph.
ntb
n1 n2 n3 n4
4
1150
vòng/phút
(1370 1150) * 0.055 12.1%
n 100
Ne= 55*(1-0.121) = 48 mã lực
Đo công suất theo phương pháp gia tốc: dựa trên nguyên tắc sự thay đổi tốc độ góc của động cơ phụ thuộc vào công suất động cơ, khi công suất động cơ càng lớn thì gia tốc càng lớn. Thực chất của dụng cụ đo là thời gian tăng tốc từ tốc độ thấp tới tốc độ định mức khi tăng tốc đột ngột, chỉ thị sẽ là công suất động cơ.
Có thể sử dụng thiết bị đo HMR-2M của Liên Xô gồm có cảm biến, khối tính
toán chuyển đổi, đồng hồ chỉ thị công suất và số vòng quay, bộ phận điều khiển.
Bộ cảm biến kiểu cảm ứng được gắn vào một lổ trên vỏ hộp bánh đà động cơ, đối diện với đỉnh răng của bánh răng khởi động và cách một khoảng 2 đến 4(mm). Khi bánh đà quay, trong bộ cảm biến sẽ xuất hiện dòng điện hình sin có tốc độ xung
điện:
f= ns * z ns: Số vòng quay trục khuỷu trong một giây. Z: Số răng trên vành răng bánh đà .
Các xung được truyền sang khối tính toán chuyển đổi, ở đây nó được khuyếch đại và biến đổi thành dòng điện một chiều để đưa vào bộ chỉ thị và đo số vòng quay n. Tốc độ góc càng lớn, các xung càng lơn, dòng điện đưa vào bộ chỉ thị công suất càng lớn nên công suất đọc càng cao.
Khi đo người ta phải đột ngột thay đổi tốc độ động cơ từ thấp tới định mức. Các phạm vi điều chỉnh tốc độ và ghi công suất được xác định theo một số loại động cơ và cho trước trên dụng cụ.
Nhược điểm độ chính xác không cao, chỉ đo được một số loại động cơ do nhà
chếtạoquiđịnh.
Đo công suất bằng phanh thử công suất: đây là phương pháp đo chính xác nhất nhưng yêu cầu phải tháo động cơ ra khỏi ôtô đặt lên phanh thử. Gây tải cho phanh có thể bằng ma sát (phanh cơ khí), lực cản của nước (phanh thuỷ lực) hoặt lực điện từ (phanh điện). Công suất động cơ được tính theo công thức:
Ne Me * Me * .n
30
Me cân bằng với mômen cản của phanh Mc
1.3 Tổng quan về thiết bị đo công suất:
1.3.1 Thiết bị gây tải:
Thiết bị gây tải còn gọi là phanh, có nhiều loại phanh, dựa vào nguyên tắc tạo
momen hãm ta chia làm các loại phanh sau:
Phanh kiểu cơ khí
Phanh kiểu không khí
Phanh điện
Phanh thuỷ lực
1.3.1.1 Phanh kiểu cơ khí:
Là loại ra đời sớm nhất, có kết cấu đơn giản, sử dụng tương đối dễ , độ chính xác khá cao. Tuy nhiên nó làm việc không ổn định do lượng nhiệt phát ra lớn, khó điều chỉnh và cồng kềnh khi công suất lớn.
1: má phanh , 3: bánh đà, 5: bu lông hãm
2: tấm ma sát , 4: trục động cơ, 6: thiết bị cân lực
Nguyên lí hoạt động : khi động cơ làm việc, má phanh có xu hướng quay tròn, nhờ lực hãm của bulông làm cho trên phanh xuất hiện momen cân bằng tương ứng với momen ma sát xuất hiện giữa tấm ma sát với bánh đà về trị số. Momen cân bằng này được truyền đến tay đòn và thiết bị cân lực hiển thị số. Ta có:
Mcb = Mms + MX = P.l +Mms
l: cánh tay đòn được gá chặt trên phanh
P: trị số lực lấy trên thiết bị cân lực
Khi đó công suất động cơ được tính theo công thức:
Ne .n. *
30
P.l
74.6
1.3.1.2 Phanh không khí:
Nguyên lí hoạt động: bộ phận gây tải của phanh không khí là 1 chong chóng có profin cánh xác định. Momen cản của phanh loại này tỉ lệ bình phương với tốc độ quay. Để thay đổi momen cản, có thể thay đổi độ nghiêng của cánh, chiều dài cánh hoặt van tiết lưu dòng không khí ra vào phanh. Động cơ được đặt trên một khung lắc (được gá chặt). Khi động cơ làm việc sẽ tạo ra momen quay làm quay chong chóng, chong chóng quay sinh ra một momen cản làm cho động cơ có xu hướng nghiêng đi một góc nào đó. Để giữ động cơ, trên khung lắc xuất hiện một momen cân bằng có trị số bằng trị số trên lực kế nhân với cánh tay đòn của khung lắc.
Mcb=Mc=P.l
Trong đó:
Mc: momen cản xuất hiện ở chong chóng (KN.m, KG.m) Mcb: momen cân bằng (KN.m, KG.m)
l:chiều dài cánh tay đòn (m)
Phanh không khí làm việc ồn, kết cấu phức tạp, việc tính toán sẽ phức tạp khi mật độ không khí thay đổi. Vì vậy nó chỉ được dùng để kiểm tra đông cơ máy bay.
1.3.1.3 Phanh thuỷ lực:
Phanh thuỷ lực được sử dụng rộng rãi trên các bệ thử vì nó có cấu tạo đơn giản, độ chính xác cao, đo được công suất rất lớn. Phanh thuỷ lực hiện nay có phạm vi đo công suất rất rộng, từ vài chục đến vài chục ngàn mã lực (60.000 HP).
Phanh thuỷ lực hoạt động theo nguyên lí: chất lỏng được đẩy vào phanh có nhiệm vụ tải nhiệt cho thiết bị và tạo ra lực (momen cản). Công suất tiêu hao cho việc làm mát nước được xác định theo công thức:
Mf=Gn.C.(Tr-Tv)
Trong đó:
Mf: công suất tiêu hao trong phanh
Gn: lượng nước cần thiết cho phanh làm việc
C: tỷ nhiệt của nước
Tr, Tv: nhiệt độ đầu ra vào của nước
Như vậy công suất cần đo sẽ bằng công suất tính toán trên lực kế cộng với công suất tiêu hao trong phanh thuỷ lực.
Md=Mf +P.l
Về kết cấu, phanh thuỷ lực tương đối đa dạng, nhưng có thể chia ra các dạng sau
Phanh thuỷ lực kiểu đĩa
Phanh thuỷ lực kiểu cánh
Phanh thuỷ lực kiểu buồng
Phanh thuỷ lực kiểu thể tích
Phanh thuỷ lực kiểu màng
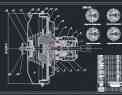
Cấu tạo, nguyên lí hoạt động của phanh thuỷ lực kiểu đĩa. Cấu tạo:
1: đường nước vào, 2: bánh công tác
3: stato, 4:thiết bị cân lực, 5: van xả nước
Rôto của phanh được gắn trên trục động cơ. Trên rôto gắn các đĩa nhằm tăng sự truyển động công suất của nước, stato được gắn trên một gối đỡ phụ có thể dao động tự do quanh trục.
Nguyên lí hoạt động: khi động cơ làm việc làm cho rôto của phanh quay. Nếu không có nước, lúc đó động cơ chạy không tải. Tuỳ thuộc vào lưu lượng nước mà ta có các cấp tải khác nhau. Dưới tác dụng của lực (momen) từ rôto sang môi trường nước làm cho vỏ (stato) quay, để giữ cho stato đứng yên, người ta gắn cứng với stato một cánh tay đòn lực, phía dưới có nối với thiết bị cân lực. Momen nhận được dưới tác dụng của thiết bị cân lực sẽ cân bằng với mômen ma sát thuỷ động tác dụng lên phanh.
Ưu điểm: kết cấu đơn giản, hoạt động tin cậy, nhân tố ảnh hưởng tới sai số của
phép đo nhỏ (0.2-1%), chăm sóc đơn giản, giá thành không cao.
Nhược điểm: không có khả năng sử dụng năng lượng do động cơ sinh ra, không có khả năng quay trục từ phanh và khó khăn trong việc tự động điều chỉnh phanh.
1.3.1.4 Phanh điện:
Tuỳ theo phương pháp sinh ra mômen hãm người ta chia phanh điện thành các loại sau:
Phanh điện dòng điện xoáy
Phanh điện dòng điện xoay chiều
Phanh điện dòng điện một chiều
Do tính chất của máy điện là có thể hoạt động cả ở chế độ động cơ và máy phát. Ở chế độ động cơ, phanh điện có thể dùng để khởi động động cơ, chạy rà nguội. Ở chế độ máy phát, phanh điện sinh ra mômen hãm và dòng điện. Do đó phanh điện
có ý nghĩa về mặt kinh tế.
Cấu tạo, nguyên lý hoạt đông các loại phanh điện
Phanh dòng điện xoáy:
Hình: Endy Current dynamometer
Nguyên lí hoạt động: dựa trên sự tương tác từ trường của nam châm điện và từ trường của dòng điện xoáy (phucô) sinh ra. Rôto của phanh được xẽ rãnh như bánh răng và được chế tạo bằng loại thép có hàm lượng cacbon thấp (để có độ thẩm từ cao). Bên trong stato có gắn các cuộn dây kích thích, sử dụng dòng điện một chiều có cường độ thay đổi được. Khi rôto quay, các răng này lần lược đi qua các cực của stato và bị nhiễm từ rồi giải từ rất nhanh theo chu kì tạo nên dòng điện xoáy. Sự tương tác giữa rôto và stato tạo nên momen hãm. Momen này tác dụng làm quay stato theo rôto. Nhờ liên kết stato với thiết bị cân lực nên ta xác định được mômen
này.
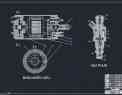
Phanh điện dòng điện một chiều:
Cấu tạo:
|
1: bệ đỡ, |
2: ổ đỡ stato, |
3: ổ đỡ rôto |
|
4: rôto, |
5:stato, |
6:chiều dài cánh tay đòn |
Sơ đồ của phanh điện dòng điện một chiều
DK: động cơ điện không đồng bộ
MF:máyphát
KTMF: cuộn kích thích máy phát KTKT: cuộn kích thích bộ kích từ MCB: máy cân bằng
KTMCB: cuộn kích thích máy cân bằng
ĐC:độngcơ
K: bộ kích từ Hình: AC dynamometer
Nguyên lý hoạt động: bộ kích từ K dùng để cung cấp điện cho các cuộn kích thích, MF gắn cùng với trục của động cơ. Giữa máy cân bằng và máy phát có liên hệ nhờ các dây dẫn. Khi khởi động hay chạy rà động cơ khảo nghiệm thì động cơ
điện không đồng bộ quay máy phát. Lúc này máy cân bằng làm việc ở chế độ động
cơ, quay trục khuỷu của động cơ khảo nghiệm.
Ta có: Mmf > Mmcb
với Mmcb là mômen trượt của máy phát và máy cân bằng.
Khi khảo nghiệm, động cơ hoạt động làm cho rôto quay máy cân bằng. Ta điều chỉnh biến trở Rmf sao cho tốc độ của động cơ bằng tốc độ của máy phát, lúc này tốc độ của rôto lớn hơn tốc độ của từ trường quay và cùng chiều với nó. Lúc này chiều dòng điện từ máy cân bằng ngược chiều với lúc chế độ máy phát. Lực từ trường ngược với chiều quay, gây momen hãm cân bằng với momen quay sơ cấp. Momen hãm này tác dụng làm quay stato, để đo momen này người ta sử dụng thiết bị cân lực mômen hãm Mcb đặt vào stato của động cơ chính bằng momen xoắn cần đo Mx trừ đi momen ma sát ở các gối đỡ.
Mcb=Mx Mms=F.l
Trong đó:
F: lực đo trên thiết bị cân lực, l: chiều dài cánh tay đòn
Dấu chỉ momen ma sát luôn ngược hướng chuyển động và luôn thay đổi
phương chiều. Sai số của phép đo này khoảng 3%
Phanh điện dòng điện xoay chiều:
Cấu tạo phanh điện dòng điện xoay chiều hoàn toàn tương tự như phanh điện dòng điện một chiều. Khác nhau cơ bản là ở phanh dòng xoay chiều không có vành đổi chiều (chổi than, cổ góp).
1.3.2 Thiết bị cân lực:
Là thiết bị không thể thiếu trong thiết bị đo công suất loại cân bằng. Đây là thiết bị đo lực (momen) lấy ra từ thiết bị gây tải. Thiết bị gây lực rất đa dạng, dựa vào nguyên tắc làm việc có thể chia làm các loại sau:
Thiết bị cân lực kiểu cơ học
Thiết bị cân lực kiểu thuỷ lực khí nén
Thiết bị cân lực kiểu đàn hồi dùng chuyển đổi điện
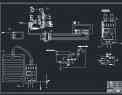
1.3.2.1 Thiết bị cân lực kiểu cơ học:
Nguyên tắc đo của thiết bị này là dựa trên nguyên lý cân bằng lực cần đo với trọng lực hay lực đàn hồi đã biết. Việc sử dụng các cơ cấu cánh tay đòn cho phép các đối trọng không lớn để cân bằng những lực tương đối lớn. Hệ thống cánh tay đòn có thể xây dựng theo hai cách:
Thay đổi vị trí đối trọng trên cánh tay đòn
Thay đổi vị trí của đối trọng
Trong các cân cơ học, cân kiểu con lắc đơn là đơn giản nhất.
Nguyên lý: dưới tác dụng của lực F truyền từ thiết bị gây tải sang hệ thống cánh tay đòn làm hệ thống quay đi một góc cho tới khi cân bằng.
l 1 l
Φ
Hình: thiết bị cân lực kiểu cơ học
Phương trình cân bằng viết cho hệ thống như sau:
F.l. cosΦ = G.l1.sinΦ +Mms + M’
Trong đó:
l , l1:là chiều dài các cánh tay đòn
G: trọng lượng của đối trọng
Mms: momen ma sát tại các khớp
M’: momen ổn định của cánh tay đòn do trọng lượng của cánh tay đòn và các cơ
cấu liên quan gắn trên cánh tay đòn.
Vì M’ phụ thuộc vào góc quay nên để thuận lợi người ta thay bằng
dM '
MΦ, MΦ =
: gọi là độ ổn định của cánh tay đòn
d
MΦ> 0 thì M’ tăng theo góc quay
MΦ<0 thì M’ giảm theo góc quay, lúc này lực tác dụng của F, G không lớn và cánh tay đòn không cân bằng vì vậy không thể tiến hành phép đo. Nếu bỏ qua lực
ma sát ở các khớp nối thì từ công thức trên ta có:
( tag M )
l .F
Khi Φ đủ nhỏ thì tagΦ≈Φ
G.l1
l1 .G
M
(1 )
G.l1
l .F
l1 .G
Như vậy ta thấy MΦ/l1.G là số hạng kể đến tính chất thực của hệ thống cánh tay
đòn. Khi tỉ số này giảm, hệ thống con lắc đi gần đến hệ thống lí tưởng.
Trong trường hợp Φ đủ lớn, để giảm ảnh hưởng đến sai số của phép đo người ta thay thế cánh tay đòn bằng một bánh răng hình quạt có bán kính R=l, nhờ đó mà cánh tay đòn của lực tác dụng không đổi. Lúc này đặc tính tĩnh của hệ thống có dạng
( sin M )
l .F
G.l1
l1 .G
Người ta căn cứ vào tổng:
sin M
để đánh giá tính chính xác của phép đo.
G.l1
1.3.2.2 Thiết bị cân lực kiểu thuỷ lực và khí nén:
Cả hai thiết bị này có nguyên tắc đo chung là biến đổi lực cần đo thành áp suất
của chất lỏng hay khí. Áp suất đo được nhờ áp kế.
Cấu tạo chung gồm một cặp piston, xylanh có khả năng đo được lực từ xa với
một giá trị bất kì.
Lực cần đo khi tác dụng vào piston sẽ gây ra một áp lực trên chất lỏng và chúng có quan hệ với nhau theo biểu thức:
F=p.Shhayp=F/Sh
Như vậy nếu Sh= const thì p và F tỉ lệ với nhau. Do đó dùng áp kế đo được p thì sẽ có được F. Tuỳ theo cách làm cho Sh = const người ta chia thiết bị cân lực kiểu này thành:
Lực kế kiểu chất lỏng tĩnh
Lực kế kiểu chất lỏng hay chất khí có bộ phận truyền dẫn
Lực kế kiểu bù
Các cân thuỷ lực có phạm vi đo khá rộng từ vài trăm đến hàng triệu Newton, sai số đo khoảng 0.2%, có nhược điểm là độ chính xác phép đo phụ thuộc nhiệt độ và tính chất của chất lỏng, kết cấu khá phức tạp.
Chương2
ĐẶC ĐIỂM CẤU TẠO PHANH ĐỘNG CƠ
DYNOmite-13
2.1 Nguyên lí hoạt động chung:
Biết chắc rằng HP = RPM * Momen xoắn / 5252. Trong phương pháp này, thiết bị đo lực DYNOmite đưa ra một phương pháp để lai động cơ (thông qua bộ hút phanh thuỷ lực). Trong khi kiểm tra số vòng quay của nó (thông qua một máy đo tốc độ góc lưu trữ dữ liệu số) và momen xoắn (thông qua một máy đo lực căng điện tử). Những dữ liệu thu nhận từ máy tính thu nhận dữ liệu DYNOmite ( có giá trị đến 200 số đo trên giây) và xuất dữ liệu dưới dạng HP và RPM.
Một phanh thuỷ lực DYNOmite nhận được sự cung cấp nước (thông qua cụm van điều khiển tải của nó) bởi một bơm được thiết kế đặc biệt tuần hoàn khép kín. Khi thực hiện bài kiểm tra động cơ, năng lượng của bơm này, công suất (HP) (chúng được hấp thu để chiến thắng sự lôi kéo và quán tính của việc di chuyển một phương tiện vận tải) được hấp thụ trong quá trình bơm nước vào phanh. Năng lượng này đi đâu? Chúng làm gia tăng nhiệt độ nước thải của bộ hút thu.
Sự lôi kéo tạo ra bởi sự quay bánh công tác dưới sự tuôn chảy cuả nước tại những van dọc theo stato (tại cạnh vỏ bọc bên ngoài thiết bị hút thu) cố gắng để xoay toàn bộ cụm thiết bị của bộ hút thu. Tuy nhiên một cánh tay đòn lực được gắn ngăn cản chuyển động xoay này. Nhiệm vụ những lực trên cánh tay đòn này chính xác là khuất phục điều đó (trực tiếp cân đối với momen xoắn nhận được). Máy đo sức căng (có giá trên bề mặt cánh tay đòn lực) tự động truyền lực khuất phục này đến máy tính DYNOmite. Nó thay đổi thành một dữ liệu số lực trình bày (footpound). Máy tính lưu trữ toàn bộ dữ liệu này, tiến hành những tính toán và trình bày nó dưới những trạng thái khác nhau. Người sử dụng có thể điều khiển van chắn, bộ lọc và những hiệu chuẩn thông thường cho phép có được một báo cáo như ý.
2.2 Những bộ phận cấu thành (danh nghĩa):
Ngoài những bộ phận chính, phanh thủy lực DYNOmite còn có những thiết bị
hỗ trợ khác. Có thể liệt kê những bộ phận chính và phụ như sau:
|
Những Bộ Phận Cấu Thành Bộ Hút Thu |
||
|
Số lượng |
Tên gọi |
|
|
1 |
Thiết bị hút thu thuỷ lực và cánh tay đòn |
0 |
|
1 |
Van điều khiển tải |
0 |
|
1 |
Ống nối lối vào bằng dây tết không gỉ |
0 |
|
1 |
Ống thoát nước thải bằng dây tết không gỉ |
0 |
|
1 |
Ống thông bằng dây tết không gỉ |
0 |
|
1 |
Chốt không gỉ |
0 |
|
2 |
Lổ miệng ống nối bộ hút thu bằng đồng |
0 |
|
1 |
Miếng đệm và bu lông lắp ghép trục khuỷu tới bộ hut thu |
0 |
|
Túi |
Những phụ trợ lắp ghép phần cứng khác |
|
|
Những Bộ Phận Thu Nhận Dữ Liệu |
||
|
Số lượng |
Tên gọi |
|
|
1 |
Máy tính thu nhận dữ liệu DYNOmite |
0 |
|
|
Bộ chuyển đổi tải cell |
0 |
|
1 |
Bộ dây nối thu nhận dữ liệu |
0 |
|
1 |
Bộ sạc điện ắc qui |
0 |
|
1 |
Cầu chì dự phòng ¼ ampe |
0 |
|
1 |
Những điện trở trên đường nối đồng hồ đo tốc độ góc |
0 |
|
Túi |
Những cọc nối hỗn hợp |
0 |
|
1 |
Những thuyết minh cho phần mềm DYNO-MAX (đĩa CD) |
0 |
|
Những Bộ Phận Cơ Bản Bản Mạch Bộ Chuyển Đổi |
||
|
Số lượng |
Tên gọi |
|
|
1 |
Bộ chuyển đổi sức căng |
0 |
|
1 |
Giao diện điều khiển |
0 |
|
1 |
Cuộn dây trích lọc bộ chuyển đổi |
0 |
|
1 |
Cáp nối |
0 |
|
1 |
Cáp cấp nguồn DC 12V (3Ampe) |
0 |
|
1 |
Khoá kẹp không gỉ |
0 |
|
Những Bộ Phận Phụ Trợ Khác |
||
|
Số lượng |
Tên gọi |
|
|
1 |
Khung trục con lăn |
0 |
|
1 |
Quả nặng định cỡ |
* |
|
1 |
Dụng cụ đo trọng lượng riêng nhiên liệu |
* |
|
1 |
Bơm nước di động chạy bằng xăng dầu |
* |
|
1 |
Dụng cụ đo độ ẩm |
* |
|
1 |
Máy in nhiệt di động |
* |
|
Những Bộ Phận Phụ Trợ Khác |
||
|
Số lượng |
Tên gọi |
|
|
1 |
Bệ động cơ |
0 |
|
1 |
Vỏ boc tiếp nối |
0 |
|
1 |
Bảng điều khiển |
0 |
|
1 |
Bệ kiểm tra nâng cấp “pro” |
0 |
|
1 |
Bộ dây nối từ bệ tới bảng điều khiển |
0 |
|
1 |
Tháp làm lạnh |
0 |
|
1 |
Hệ thống rơle điều khiển và thu nhận toàn bộ dữ liệu |
0 |
|
Những Cảm Biến Và Thiết Bị Điều Khiển |
||
|
Số lượng |
Tên gọi |
|
|
1 |
Tua bin lưu lượng khí |
* |
|
1 |
DYNO-MAX cho phần mềm hệ điều hành |
* |
|
1 |
Model cáp |
* |
|
1 |
Bộ EGT |
* |
|
1 |
Bộ chuyển đổi áp suất |
* |
|
1 |
Mạch rơle điều khiển và bộ đánh lửa |
* |
|
1 |
Bộ tăng tải tự động điên tử |
* |
|
1 |
Trạm khí tượng |
* |
|
1 |
Bộ tua bin lưu lượng nhiên liệu |
* |
2.3 Phân tích đặc điểm cấu tạo- lắp ghép một số bộ phận cấu thành:
2.3.1 Hệ thống cấp nước của DYNOmite và bộ hút thu:
Xác định độ dài ống yêu cầu để chạy từ nơi cung cấp nước tới van tải của DYnomite. Nếu đang vận hành một DYNOmite có sử dụng tháp chứa nước làm lạnh. Nó có một ống nhỏ mắc vào một van nhiệt điện trở tại vị trí dưới của tháp nước. Sử dụng lối “T” này để cung cấp nước cho tháp làm mát và lối vào van tải từ bơm.
Sử dụng một ống để kết nối từ nơi cung cấp nước tới dyno. Sử dụng một ống có kích cỡ phù hợp. Nếu dịch chuyển hay thay đổi những cơ cấu thông thường đảm bảo không bị cản trở ở lưu lượng cao.
Thiết bị hút thu được lắp với cụm ống không gỉ có đường kính phù hợp (rộng).
Sử dụng nó chạy từ lối ra van tải tới lối vào (rộng nhất) gần tâm của thiết bị hút thu
Một hoặt hai đường ống không gỉ được lắp cho việc thoát nước thải từ lối ra gic lơ (tại phía dưới của thiết bị hút thu) đến một ống phù hợp, hố nước thải hay vùng chứa chất thải.
Ống dẫn của thiết bị hút thu gồm một gic lơ bằng đồng để điều chỉnh lưu lượng. Gic lơ được lắp đặt tỉ lệ với tải của thiết bị hút thu, có thể thay đổi kích cỡ gic lơ để phù hợp nhất cho thiết bị hút thu tùy theo loại động cơ kiểm tra.
Thiết bị hút thu gồm có vỏ (stato) và bánh công tác (rôto). Khi cho động cơ hoạt động làm quay rôto, khi không có nước sẽ không tác động tới stato, khi có nước sẽ làm cho stato có xu hướng quay (thực tế không quay do sự tác động của thiết bị cân lực).
Những đường ống bên dưới đáy của bộ hút thu DYNOmite phục vụ cho hai
chức năng riêng biệt. Một là mang ra khỏi năng lượng phát ra của động cơ dưới dạng nước thải nhiệt. Mặt khác là cho phép bộ hút thu không tải ở bất cứ khi nào bạn đóng van tải lại. DYNOmite được thiết kế để làm việc đúng trên một phạm vi rộng về công suất động cơ và RPM. Để hoàn thiện khả năng dẫn động van tải với những động cơ momen xoắn rất cao tại RPM rất thấp, cần hạn chế tốc độ thoát nước
thải của bộ hút thu. Ngược lại cần gia tăng hơn giới hạn công suất (HP)/ giới hạn
nhiệt của DYNOmite có thể cần gia tăng thể tích nước tháo.
Chú ý rằng độ nhạy của van và nhiệt độ nước thải ra là tác động bởi sự thay đổi
tốc độ thải. Sự chuẩn xác của DYNOmite là không bị tác động.
Đường kính bên trong của lỗ miệng có thể được chọn để thay đổi tốc độ tại miệng những đường ống của bộ hút thu. Có thể thay thế những lỗ miệng có đường kính rộng hơn cho phép mức nước trong bộ hút thu giảm nhanh hơn (không tải động cơ nhanh hơn ) theo cách đó làm van phản ứng lại nhiều hơn. Có thể sử dụng đường ống đôi để có thể tháo nước nhanh hơn.
Nhưng đây là một cái hãm cần những đường ống rộng hơn để làm đầy bộ hút thu (khi van được mở). Đây là sự thỏa hiệp của những yêu cầu đối lập. Muốn bộ hút thu tải và không tải ở tại một tốc độ tương tự. Nói chung những đường ống rộng hơn được ghép với nguồn cung cấp nước dung tích lớn (đảm bảo giữ được áp suất động lực học )
Việc mỗi bộ hút thu có một hay nhiều lỗ miệng thoát nước nhằm giúp hòa hợp những đặc trưng tiêu biểu tải của bộ hút thu cho phạm vi momen xoắn và RPM được đo lường
2.3.2 Bộ tua bin lưu lượng khí (Airflow turbine kits):
Bộ tua bin lưu lượng khí mở rộng khả năng ghi nhận dữ liệu của DYNO-MAX được trang bị cho thiết bị đo công suất DYNOmite. Mỗi bộ đặc trưng bởi 1 bánh tua bin loại bộ chuyển đổi lưư lượng khí, giá giữ (nếu được yêu cầu) một phần mềm nâng cấp EPROM. Khi lắp đặt, sự lựa chọn này sẽ giám sát và ghi lại lượng tiêu thụ khí thực của động cơ và tính toán riêng lượng khí tiêu thụ cho phanh của động cơ trong thời gian thiết bị đo công suất thực hiện kiểm nghiệm.
Để sử dụng thiết bộ chuyển đổi lưu lượng khí bạn cần dùng một bản mạch điện tử đặt biệt, bộ dây và nâng cấp máy tính DYNOmite. Cần nhập mã cài đặt cho phiên bản máy tính riêng. Mã cài đặt hay nâng cấp máy tính được sự giúp đỡ của nhà công nghệ.
Bộ chuyển đổi lưu lượng khí phải được lắp đặt tại lối không khí vào động cơ. Các tua bin kích thướt khác nhau và những thiết bị tiếp hợp có thể sử dụng cho phép lắp ghép trực tiếp tua bin lên bất kì bộ chế hoà khí nào. Để tăng kích thướt bộ chế hoà khí, bộ phun xăng hay cho nhiên liệu đưa vào có độ đều đặn cao. Bộ chuyển đổi có thể được lắp vào một bình chứa trung gian. Bình này nên có thể tích đủ lớn để làm tĩnh nhiên liệu đưa vào.
Cắm đầu nối 5 chân của bộ chuyển đổi (có tên là bộ nối DIN) vào đầu nối của
máy đo công suất DYNOmite.
Giả sử máy tính DYNOmite đã được nâng cấp để hỗ trợ bộ chuyển đổi lưu lượng khí đi tới “Electronic – DYNOmite Auxiliary Board 2- Air Flow A
Calibration” của DYNO-MAX và cài đặt “hệ số hiệu chỉnh bộ chuyển đổi” để tạo ra giá trị chính xác trên đồng hồ tua bin lưu lượng khí.
Một bộ chuyển đổi lưu lượng khí được lắp đặt chính xác DYNO-MAX sẽ luôn luôn giám sát lưu lượng khí (tại CFM) và tính toán BSAC (bằng pound trên giờ trên HP). DYNO-MAX cung cấp một hệ số hiệu chỉnh liên quan cho việc hiệu chỉnh chính xác đồng hồ tua bin lưu lượng khí được sử dụng. Trong khi, việc mặc định lại hệ số hiệu chỉnh bộ chuyển đổi DYNO-MAX là được hiệu chỉnh lạicho mỗi cỡ tua bin danh nghĩa, có thể nối chính xác bất kì bộ chuyển đổi tới một nhánh lưu lượng định cỡ sẵn bởi việc hiệu chỉnh hệ số. Bất kì lỗi nào trong chỉ số đo lưu lượng DYNO-MAX được bù một cách đơn giản bởi hiệu chỉnh “ hệ số hiệu chỉnh bộ chuyển đổi” cho đến khi số đo DYNO-MAX phù hợp số đo nhánh lưu lượng. Đảm bảo rằng “hệ số hiệu chỉnh bộ chuyển đổi” luôn được nhập vào khi đang kiểm nghiêm động cơ.
+ Bộ chuyển đổi lưu lượng chuẩn 3” cung cấp một điện thế trung bình 3V ở tần số xấp xỉ 60Hz tại một tốc độ chảy là 18.4 CMF. Hệ số hiệu chỉnh bộ chuyên đổi danh nghĩa lúc này là 14000.
+ Bộ chuyển đổi lưu lượng chuẩn 4” cung cấp một điện thế trung bình 3V ở tần số xấp xỉ 60Hz tại một tốc độ chảy là 22.3 CMF. Hệ số hiệu chỉnh bộ chuyên đổi danh nghĩa lúc này là 11300.
+ Bộ chuyển đổi lưu lượng chuẩn 6-1/2” cung cấp một điện thế trung bình 3V ở tần số xấp xỉ 60Hz tại một tốc độ chảy là 81.4 CMF. Hệ số hiệu chỉnh bộ chuyên đổi danh nghĩa lúc này là 2744.
+ Bộ chuyển đổi lưu lượng chuẩn 9” cung cấp một điện thế trung bình 3V ở tần số xấp xỉ 60Hz tại một tốc độ chảy là 205.3 CMF. Hệ số hiệu chỉnh bộ chuyên đổi danh nghĩa lúc này là 982.
2.3.3 Tháp làm lạnh (Cooling Tower):
Bộ ổn nhiệt của DYNOmite được điều khiển bởi tháp làm lạnh ( giải nhiệt) nên nó điều khiển chính xác nhiệt độ làm việc của nước làm mát động cơ trong suốt quá trình đo công suất kéo dài. Để giữ nhiệt độ động cơ ổn định và chính xác phải có sự hoàn thiện cao nhất, độ tin cậy cao và có khả năng lặp laị dữ liệu kiểm tra.
Tháp sử dụng một kiểu làm mát kín dần dần hoà trộn trong nước lạnh (Từ nguồn cung cấp) để điều chỉnh nhiệt và không gia tăng ứng suất nhiệt trong động cơ. Nước lạnh được đưa vào hệ thống làm mát chỉ khi được cần để giữ nhiệt độ động cơ đã cài đặt.
Tháo đai ốc bằng thép không gỉ ½”-13 từ đỉnh của tháp giải nhiệt, nhấc vòng
đệm giữa tháp ra.
Tấm đế của tháp có vòng đệm gắn trong lỗ để gắn chặt lên bệ động cơ hay két nước (sử dụng vòng o để những đầu bulông ép chặt vào tấm đế) trên một vị trí tương ứng.
Cẩn thận lắp trượt các phần tháp giải nhiệt lẫn nhau và lắp các khớp xoay riêng biệt để lắp tốt nhất với ngõ nước ra nước vào động cơ. Sử dụng mỡ bôi trơn lên các vòng o để tránh trầy xướt chúng trong quá trình lắp ráp những bộ phận của tháp giải nhiệt.
Gắn bulông vào tấm đỉnh cho lên tháp và siết chặt đai ốc lại.
Mang đường ống cấp nước vào tới nối vào chữ T 1” bên dưới đáy của tháp nước. Đảm bảo rằng sự cung cấp nước và cỡ đường ống là đầy đủ cho lưu lượng yêu cầu của bộ hút thu và làm mát động cơ. Trong quá trình cài đặt bạn có thể thay thế một chữ T khác cho phù hợp lối vào van điều khiển tải của dyno.
3 vị trí van tại đáy của tháp phải được lắp đặt đủ 3vị trí để ngay lập tức làm đầy khối động cơ và tháp giải nhiệt ngay lúc đầu. Khi khối đầy (đích xác bởi lượng nước chảy ra từ vòi ống 5/8” tại phía dưới tháp nước) di chuyển van tới vị trí bình thường “run”
Đảm bảo đường ống (chính xác là đầu toe nối) không bao giờ bị nghẽn cặn. Nó sẽ có lượng nước gần sôi chảy qua nó trong suốt thời gian vận hành và vì vậy sẽ bị đóng cặn thêm.
Bộ ổn nhiệt gắn dưới đáy của tháp giải nhiệt có một mặt đồng hồ số được cài đặt và có thể điều chỉnh được với một tua vít. Cài đặt nó tại nhiệt độ mà bạn muốn tháp giữ. Bất kì khi nào nhiệt độ trong tháp lên trên nhiệt độ đã chọn này, nước sẽ được cung cấp thêm vào và lượng dư ra sẽ chảy ra ngoài qua ống thoát.
Dùng một đồng hồ số hiển thị nhiệt độ cho việc cài đặt ban đầu. Có thể xoay nó lên sau khi vận hành động cơ và giám sát nhiệt độ động cơ.
Khi tháo nước từ khối, vặn van tới vị trí “Drain” và đợi cho nước từ tháp chảy
ra ngoài dưới tác dụng của trọng lực.
Không bao giờ quên làm đầy thùng nước và vặn van lại vị trí “run” khi vận hành động cơ. Nếu không sẽ làm quá nhiệt động cơ trầm trọng khi van vẫn còn ở vị trí “Drain”.
2.3.4 Bộ tăng tải tự động điện tử (Electronic Auto- Load Servo):
Bộ van điều khiển tăng tải tự động điện tử nâng cấp việc điều khiển tải thủ công của chúng ta cho bộ hút thu phanh thuỷ lực. Bộ này cung cấp thiết bị điều khiển tự động RPM của động cơ kiểm tra. Thêm vào đó, bao gồm phần mềm nâng cấp E- PROM của máy tính thu nhận dữ liệu DYNOmite cộng thêm những chức năng quét tự động và ghi chép tự động. Sự khai thác đầy đủ chức năng yêu cầu sử dụng bộ tăng tải tự động điện tử. Những hướng dẫn sau giúp lắp đặt và vận hành bộ van này.
Lắp đặt van tải tự động giống như miêu tả trong sách hướng dẫn của bản thân nhà sản xuất DYNOmite cho van điều khiển thủ công.
Kết nối hai dây cấp nguồn tăng tải, đầu đen tiếp đất được nối tới cọc âm của ắc
qui đầy điện áp 12V.
Máy tính thu nhận dữ liệu DYNOmite và những đầu tiếp đất phải được kết nối tới cùng một đầu tiếp đất của ắc qui (cọc âm). Không kết nối bất kì đường nối dương nào và không cố gắng cấp nguồn cho động cơ hay phụ tùng của nó cho đến khi tất cả các đầu tiếp đất được nối. Những hư hỏng xảy ra có thể dẫn tới nhiều tín hiệu điện từ hoặt mạch nguồn bị hỏng.
Nối hai sợi dây đỏ của nguồn phụ vào ắc qui đầy 12V. Luôn kiểm tra điện áp ắc
qui có đủ không trước khi có những kiểm tra khác.
Nút cấp nguồn của bộ tăng tải được chốt vào hai dây nối bộ nguồn phụ. Đảm
bảo đã mắc một cầu chì 5-ampe vào bộ đó
Bộ dây nối đầy đủ các đường nối có một đường nối “SERVO” với giắc nối 6 chân . Chốt nó vào giắc nối 6 chân tương ứng của bộ tăng tải tự động.
* Sự vận hành bộ tăng tải tự động điện tủ:
Với bộ tăng tải tự động được lắp đặt. Có thể chọn từ một vài phương pháp điều
khiển. Sử dụng trình đơn “Stepper Motor Control Mode”.
Phần mềm hệ điều hành DYNO-MAX có cài đặt trình đơn tương ứng và nút
điều khiển cho mỗi đặt trưng dưới đây.
Stepper Motor
Control Mode: Manual Stepper
Stepper Motor
Holding RPM
3000 RPM
- Màn hình này cài đặt bộ tăng tải để điều khiển tải chuẩn
trên rpm giữ của động cơ bạn sẽ nhập vào.
- Đây là nơi bạn cài đặt RPM giữ ban đầu. Bất kì lúc nào
động cơ vượt quá RPM giữ này, bộ tăng tải tự động mở
van tải rộng hơn để quay động cơ lại số vòng quay RPM
đó (và đóng van tải nếu rpm rớt xuống). Trong suốt qúa trình quét tự động những điều chỉnh RPM của DYNOmite diễn ra từ lúc bắt đầu tới kết thúc quá trình quét.
Nhập sẵn RPM vào ngay lúc đầu. Sau đó bắt đầu khởi động động cơ, tăng tốc đều đặn từ giữa phía sau tới vừa trên rpm giữ. Máy tính sẽ tự động mở van tải (ổn định). Mở rộng van hơn để cố gắng giữ một rpm cao hơn rpm giữ. Sau đó ổn định vị trí ở van tiết lưu mở rộng . Bắt đầu giám sát dữ liệu trên màn hình máy tính (hay bắt đầu ghi chép) .
Nếu nhấn nút “Test” để bắt đầu ghi dữ liệu (trong khi điều khiển tốc độ bằng tay), có thể thay đổi rpm giữ bằng việc nhấn nút “+” hay “-“ để tăng hay giảm tương ứng rpm.
Nhấn đồng thời phím “Next” trong khi nhấn phím +/- giúp giá trị thay đổi nhanh hơn. Nếu sử dụng DYNO-MAX có thể thay đổi rpm giữ bằng các phím mũi tên.
Stepper Motor Control Mode Auto 200rpm/sec
Stepper Motor
End Auto Test
5000RPM
Record 5250rpm
Torque 115.0
Power 115.0 HP Speed 5252 rpm
-Mục này thiết lập bộ tăng tải chạy ở một gia tốc quét ổn định (ở tốc độ hiển thị) từ rpm giữ ban đầu tới rpm kết thúc tự động kiểm tra đã chọn.
-Mục này cài đặt rpm tự động kết thúc kiểm tra. Đây là rpm tại đó DYNOmite thoát tự động kiểm tra (sau rpm đó nó tự động bắt đầu lại từ rpm giữ đã chọn).
-Đây là trình đơn phô bày trong thời gian tự động ghi chép. Bắt đầu sự vận hành chính xác tự động kiểm tra đã chọn bằng việc nhấn nút Text .
Để điều khiển chính xác một bài kiểm tra tự động (sử dụng
những cài đặt trên). Cần mở hết van tiết lưu để vận hành động cơ.Bộ tăng tải tự động tác động động cơ tại rpm giữ đã cài đặt. Khi mà nó giữ vững nhấn nút Text để bắt đầu quá trình quét tự động. Sau đó động cơ đạt tới rpm dừng kiểm tra tự động đã định sẵn. DYNOmite tự động cài lại động cơ ở điểm tốc độ 3000rpm ban đầu. Van tiết lưu đóng lại và dữ liệu sẵn sàng để kiểm tra.
Để điều khiển chính xác, bậc tốc độ của động cơ ,và những hệ số gia tăng , sự
trôi phải phù hợp cấu hình động cơ và bộ hút thu kết hợp đang được kiểm tra.
Nhóm động cơ công suất thấp với quán tính trục khuỷu thấp hầu như không thể điều khiển trong dải tốc độ rpm. Có thể loại trừ dải tốc độ này từ bài kiểm tra của bạn, hay cộng vào quán tính dẫn động (bánh đà nặng hơn là một ví dụ, để hoàn thiện rộng hơn rpm điều khiển).
2.3.5. Bộ góp khí xả (Exhaust Gas Temperature Kit):
Bộ nhiệt độ khí xả mở rộng khả năng ghi chép dữ liệu của máy tính thu nhận dữ
liệu DYNOmite. Bộ này bao gồm bộ cấp nhanh (chân nối nổi) cặp nhiệt điện loại K
và yêu cầu phần mềm nâng cấp E-PROM. Khi lắp đặt, bộ này sẽ giám sát và ghi chép tới 4 kênh (trên đôi bảng được lắp đặt )của thời gian thực, dữ liệu nhiệt độ cao của động cơ.
Bộ khí xả này cũng yêu cầu bộ dây nối đa chức năng, khống chế quá tải và nhập
mã cài đặt vào máy tính thu nhận dữ liệu .
1.Bộ kiểm soát khí xả phải được lắp tại ống khí xả của động cơ. Lí tưởng, nên được lắp đặt cách cửa xả của xi lanh một vài inches. Những kiểu cặp nhiệt điện khác nhau và những sự sắp xếp lắp đặt để có thể được sử dụng để đơn giản hoá việc lắp đặt trong những ứng dụng khác nhau.
Trong hầu hết động cơ nên cố gắn lắp đặt cặp nhiệt điện cách van xả 6” đến 8”. Nếu lắp đặt quá xa cửa xả, nhiệt độ thực sự của cửa xả (và những số đo của nó) đo được thực tế sẽ giảm. Tuy nhiên nếu đặt quá gần cửa xả cũng làm số đo giảm xuống do tác động làm mát của bộ lọc khí xả (sự lắp đặt này dựa vào kinh nghiệm đối với những loại động cơ và ống xả). Đối với những xi lanh liên hoàn, lắp đặt mỗi bộ kiểm soát là cùng khoảng cách từ những xilanh (để mà những số đo liên quan không bị ảnh hưởng bởi nơi lắp đặt bộ kiểm soát) . Ngoài ra bộ kiểm soát cần tránh đặt gần nơi tiếp giáp “Y” hay “T” trong ống xả, khi đó nhiệt độ gần những nơi này có khuynh hướng bị tác động bởi lưu lượng trong những nhánh kề bên.
2.a. Bước 2(a-d) là dành cho cặp nhiệt điện loại “Band Clamp Mount”- có lắp
bộ phận móc kẹp. Nếu cặp nhiệt điện không có bộ phận móc kẹp tiến hành bước
3(a-h) . Sự lắp đặt ưa thích cho Xe trượt tuyết và bỏ bớt miếng kim loại mỏng lớn
trong sự lắp đặt ống khí xả để tránh sự cần thiết làm ống nối tiếp tới đầu ống xả.
2.b. Khi đã chọn vị trí lắp đặt như được miêu tả trong bước 1. Khoan 1 lổ đường
kính 3/16” cho mỗi nhiệt điện.
2.c. Lắp mỗi nhiệt điện vào trong mỗi lổ khoan và bó sát nó vào đường ống xả
sửdụng bộ phận khoá.
2.d. Nếu độ hở cho phép liên kết lò xo và đường nối một góc 90 độ với ống khí xả. Điều này sẽ định vị chính xác đầu thiết bị điện báo trong ống xả.
3.a. Bước 3(a-h) là cho kiểu nhiệt điện lắp bằng khoá áp lực. Nếu cặp nhiệt điện của bạn có một bộ phận khoá bỏ qua tới bước 4. Khi bạn chọn một vị trí lắp đặt như trên . Khoan lổ đường kính 5/16” cho mỗi nhiệt điện. Lắp đặt bằng khoá áp lực được ưa thích ở những động cơ có ống khí thải bằng nhôm, đường kính ống thải nhỏ hay đầu nhỏ. Vị trí lắp đặt ở đâu phụ thuộc kỹ năng quan sát, lắp đặt được yêu thích.
3.b. Nếu bạn đang lắp một nhiệt điện vào một ống góp hay ống thải bằng thép cỡ mỏng, tâm của mỗi nhiệt điện được đặt vặn vào trong lổ của ống và hàn lại trong ống. Giữ đầu nối chắc chắn tại nơi đó và hàn quanh 360 độ đảm bảo gắn chặt vào ống.
3.c. Lắp đặt từng chốt đầu nối của khoá áp lực vào mối hàn trên thiết bị tiếp nối
và vặn chặt .
3.d. Sử dụng một vật đánh dấu hay bút chì. Vẽ một dấu trên bộ kiểm soát ở vào khoảng giữa đường kính của ống góp thêm một inch (gồm chiều dài của mối hàn trên thiết bị tiếp nối và khoá áp lực) từ đầu nhô ra của bộ kiểm soát.
3.e Lắp đai ốc (với cỡ của nó trên đầu lồi của bộ hút thu) và vòng đệm sắt vào bộ kiểm soát.Lắp bộ kiểm soát vào trong đế của bộ khoá áp lực tại điểm nơi mà vòng đệm và vạch dấu trùng nhau (điều này đảm bảo bộ kiểm soát lắp vào khoảng giữa dòng khí xả).
3.f. Giữ bộ kiểm soát tại vị trí đặt. Vặn chặt bu lông áp lực lên vòng hãm và vỏ
bộ kiểm soát.
3.g. Nới lỏng đai ốc đến điểm bộ kiểm soát xoay được và nếu khoảng trống cho phép. Lắp đặt lò xo đàn hồi và dây dẫn tại vị trí tạo góc 90 độ so với ống khí xả. Điều này sẽ định vị chính xác đầu thiết bị điện báo trong dòng khí xả.
3.h. Vặn chặt bu lông lại để đảm bảo bộ kiểm soát. Không được buộc những đường nối quá chặt sẽ làm dài đoạn chổi cong và làm giảm sự định hướng đường dây nối tới thiết bị sử dụng hay những dây liên lạc thích hợp. Điều đó sẽ cho phép dây hợp lại chống sự chấn động của những dây dài của đường nối từ ống khí thải liên quan .
4. Giả thuyết máy tính DYNOmite đã nâng cấp để hỗ trợ cho bộ nhiệt độ khí xả,
đi vào “do you want to zero the exhaust temp sensor” nhấn Print.
5. Đảm bảo có một bộ kiểm soát của xi lanh cắm vào đầu nối EGT xi lanh và đầu đó của bộ kiểm soát là ở nhiệt độ phòng. Nhấn Print để cài đặt bộ kiểm soát này tới số đo nhiệt độ 70 độ Fehrenheit.
6. Bạn sẽ luôn được trình bày với mỗi lần của 3 xi lanh chính để cài đặt chúng tới 70 độ. Có thể nhấn “Calibration” để bỏ qua bất kì bộ kiểm soát nào mà không thay đổi sự hiệu chỉnh của nó. Phải cài đặt lại bộ kiểm soát trong khoảng hơn một tháng (nếu bạn không thay thế bộ kiểm soát ).
7. Khi bộ kiểm soát đã được lắp đặt chính xác và đã được định cỡ. Máy tính DYNOmite sẽ luuôn giám sát nhiệt độ của bộ kiểm soát. Để xem hoặt in những thông tin này chọn một trong hai sự lựa chọn Printout hay Display Mode để có bảng dữ liệu cần quan tâm.
Nếu ghi chép một quá trình vận hành, DYNOmite cũng sẽ ghi chép thông tin EGT. Thậm chí nếu bạn không vào chế độ Display Mode để chỉ ra những thông tin khi kiểm tra, Vẫn có thể (luôn luôn) in (hay phô diễn lại) tất cả vùng dữ liệu của DYNOmite mà có khả năng ghi lại.
Nhiệt độ khí thải (EGT) là cực kì quan trọng trong việc định cỡ đường cong sự phun nhiên liệu hay tia riêng biệt cho động cơ trong thời gian dyno kiểm tra hay lúc phương tiện vận tải đang vận hành. Trong khi mỗi động cơ tạo ra những tín hiệu nhiệt khí xả, khi đó bạn có kinh nghiệm với những số đo EGT trên những động cơ thiết kế tương tự nhau. Những giá trị EGT giúp định rõ động cơ được điều chỉnh đúng không. Ngoài ra khi quá nhiệt sẽ là nguyên nhân cho những piston giãn nở, hiểu biết về EGT có thể giúp tránh chi phí phục hồi động cơ quá đắt do hư hỏng nặng , giảm tốc độ , hao phí thời gian. Những thay đổi về thời tiết, độ cao, nhiên liệu cung cấp và điều chỉnh, tất cả tác động bất lợi tới nhiệt độ khí xả. Bằng những thay đổi tới nhiệt độ khí xả đã xảy ra trước khi sự cố hình thành, cho phép bạn thoải mái thay đổi sự điều chỉnh của van hay vận tốc chạy để ngăn sự gãy vỡ tại thời điểm xấu nhất.
Nói chung nếu tất cả nhiệt độ mỗi xi lanh nằm trong +/- 50 độ Fahrenheit và những số đo là 150 đến 200 độ Fehrenheit dưới nhiệt độ tối đa đạt được trên đường cong công suất hình chuông thì luôn vận hành an toàn và có hiệu suất cao nhất.
2.3.6 Bộ chuyển đổi lưu lượng nhiên liệu (Fuel Flow Transducer Kit):
BSFC Dùng cho DIESEL
Lưu lượng nhiên liệu và sự tiêu thụ nhiên liệu riêng của phanh mở rộng khả năng ghi dữ liệu của máy tính DYNOmite. Đặt trưng của mỗi bộ này là một bộ chuyển đổi lưu lượng loại cánh tua bin. Pha tạp giữa hệ thống ống và phần mềm nâng cấp EPROM. Khi được lắp đặt thì mục này giám sát và ghi chép lại sự tiêu thụ nhiên liệu thực của động cơ và tính toán lượng tiêu thụ nhiên liệu cho riêng phanh động cơ khi thiết bị đo công suất kiểm nghiệm.
Để sử dụng bộ chuyển đổi lưu lượng cần một bảng điện tử đặc biệt, bộ dây đa năng và một máy tính nâng cấp phần mềm EPROM .
1. Bộ chuyển đổi lưu lượng nhiên liệu phải nối tới đường nhiên liệu vào của động cơ. Những ống nối khác nhau và những thiết bị tiếp hợp được nối lại một cách thích hợp. Mũi tên trên đỉnh của bộ chuyển đổi chỉ hướng nhiên liệu vào.
Hầu hết bơm nhiên liệu chịu được sức cản dòng chảy của bộ chuyển đổi tốt hơn nếu bộ chuyển đổi được lắp dặt sau bơm hơn là lắp đặt trên đường hút. Nếu động cơ có nhiều bơm nhiên liệu nên gộp “T” các đường ống lại với nhau ở tại nơi ra của bơm nhiên liệu và sau đó lại tách đôi sau bộ chuyển đổi với “T” khác để đi tới bộ chế hoà khí.
2. Chọn một vị trí thuận tiện trên phương tiện vận tải nơi mà có thể lắp bộ
chuyển đổi lưu lượng và lắp bộ phanh để mà dây nối bộ chuyển đổi không bị “UP”.
Để cải thiện dòng chảy nhiên liệu tại giới hạn vận chuyển nhiện liệu đã cài đặt, tránh lắp bộ chuyển đổi hay đường ống cao hơn bơm nhiên liệu.
3. Cắm bộ nối 3 chân nổi của bộ chuyển đổi vào bộ nối DYNOmite.
4. Giả sử máy tính DYNOmite đã được nâng cấp để hỗ trợ cho bộ chuyển đổi lưu lượng nhiên liệu, đi tới trình đơn “Set Specific Gravity of Fuel” và nhập trọng lượng riêng của nhiên liệu đang dùng vào. Nếu không biết trọng lượng riêng của nhiên liệu phải kiểm tra với một thuỷ kế.
Nếu không có thuỷ kế và vừa muốn “lấy nhanh- cẩu thả”, có thể sử dụng 0.73 cho dầu xăng (hay 0.83 cho cồn). Tuy nhiên để có một so sánh chính xác chỉ số BSFC với dữ liệu công bố bạn phải sử dụng một thuỷ kế để kiểm tra trọng lượng riêng của nhiên liệu.
5. Khi bộ chuyển đổi được lắp đặt chính xác và trọng lượng riêng nhiên liệu được nhập chuẩn xác, máy tính DYNOmite luôn giám sát lưu lượng nhiên liệu (bằng pound trên giờ) và tính toán BSFC (bằng pound trên giờ trên HP).
2.3.7 Bộ trích lọc cảm ứng RPM (Inductive RPM Pick-Up):
Máy tính thu nhận dữ liệu DYNOmite chuẩn có một mạch điện đồng hồ đo tốc độ góc. Mạch này làm việc bởi xung điện từ bộ phận đánh lửa của động cơ hay máy phát AC của động cơ. Đường nối màu vàng này “AC INPUT” bình thường được nối trực tiếp tới dây nối của động cơ. Khi lựa chọn, trên nhiều đường nối đánh lửa được trang bị cho động cơ, đều có thể sử dụng một “khoá mở” thay vì bộ trích lọc cảm ứng RPM. Giả định có máy tính DYNOmite kết nối và có hiệu lực trên động
cơ.
1. Kết nối đường nối màu vàng “AC INPUT” của DYNOmite tới đường nối
màu vàng của bộ trích lọc cảm ứng RPM .
2. Sử dụng đường nối “T” màu nâu nối đầu tiếp đất màu đen của bộ cảm ứng
RPM vào đường tiếp đất của máy tính DYNOmite.
3. Nối đường nối đỏ / trắng của bộ trích lọc cảm ứng rpm vào trong đường nối đỏ/ trắng điện áp ra 8V của bộ dây đa năng máy tính dữ liệu.
4. Chú ý hướng mũi tên ngược nhau trên bộ khoá trích lọc, kẹp nó vào trên một
trong những dây nối của động cơ.
Nếu không có một số đo, đập nhẹ trên khoá để bề mặt mũi tên phân cực hướng tới đuôi của dây chốt. Chỉ có thể sử dụng bộ trích lọc cảm ứng trên cuộn dây sơ cấp (thấp áp) của bộ đánh lửa.
Có thể trang bị động cỏ với những nút điện trở hay những dây có vỏ bọc có lõi bằng than chì để ngăn chặn nhiễu sóng điện từ.
5. Cài đặt “Engine RPM Signal Type per Revolution” để phù hợp với số lần
phát ra tia lửa điện trên một vòng quay (trình bày tại phần hiệu chỉnh và lắp đặt)
2.3.8 Bộ cảm biến RPM/MPH trục Jack (Jack-Shaft RPM/MPH Sensor Kit):
Bộ cảm biến RPM/MPH trục mở rộng khả năng ghi chép dữ liệu trên bo mạch máy tính DYNOmite. Đặt trưng của bộ này, một bu lông trên cảm biến Hall tới bộ kiểm tra RPM trục thứ cấp. Máy tính sử dụng những thông tin này kết hợp với RPM động cơ để tính toán tỉ số truyền trục và MPH phương tiện vận tải. Cần một phần mềm EPROM cho máy tính.
1. Chọn một vị trí dọc theo trục dẫn thứ cấp hoặt trục kích (Jack-Shaft) nơi mà có khoảng trống để lắp cổ góp tín hiệu điện từ và để gắn cảm biến Hall.
2. Khoá chính xác vòng đai trong vào trục tại vị trí đã chọn. Sử dụng một
Loctite màu xanh trên hai đầu vít cắm giữ an toàn cho cổ góp.
Một nam châm ngoài được cung cấp cho việc lắp vào những trục có đường kính lớn . Nó có thể giữ an toàn ở rpm thấp với độ rộng 1”, dùng nylon thay cho băng dính bị mất.Sử dụng vài cung ôm quấn quanh trục. Hướng cực của nam châm được lắp đặt phải phù hợp với những cổ góp đã được lắp đặt trước đó.
3 Dùng hai vít kim lại mỏng hay hai vít máy, khoá hơi, khoá velero… đảm bảo cảm biến cố định trên khung. Đường tâm của bề mặt vát của cảm biến phải trùng đường tâm của cổ góp điện từ.
Để có số đo RPM tin cậy, bề mặt của cảm biến phải vào khoảng 3/32” (+/-
1/32”) của đường kính ngoài cổ góp điện từ xoay.
4. Cắm bộ nối 5 chân của cáp cảm biến vào chân nối máy tính dữ liệu đầu
“Jack-Shaft”.
5. Giả sử trục đã được lắp phù hợp với một cổ góp từ đơn chuẩn, cài đặt chính xác loại tín hiệu RPM của trục là 1 xung trên một vòng.
6.Giả sử phần mềm EPROM của máy tính DYNOmite đã được nâng cấp để hỗ
trợ cho bộ lọc trích cảm ứng MPH trục .
7. Từ màn hình dữ liệu thực ban đầu, kiểm tra vận hành xe trên bệ (hay tại một nơi kiểm tra mở). DYNOmite sẽ trình bày số liệu thực MPH của phương tiện vận tải, RPM của trục, tỉ số truyền trục, RPM động cơ. Để định cỡ lại sự trình bày MPH, phải chú ý độ lệch từ tốc độ thực của phương tiện vận tải (từ đồng hồ đo tốc độ của nó, sung bắn tốc độ…) và MPH được trình bày trên DYNOmite. Chính xác độ lệch bởi sự điều chỉnh hệ số chuyển đổi tốc độ động cơ của DYNOmite lên hay xuống cho đến khi MPH được trình bày và thực tế là phù hợp.
Nếu phương tiện vận tải chính xác chạy ở 30 MPH nhưng sự trình bày lại lệch tới 60 MPH , khi đó phải gấp đôi hệ số (60/30=2). Nếu là 40 thay đổi tới 80.
Nếu sau đó bạn thay đổi tỉ số truyền của phương tiện vận chuyển, phải định cỡ
lại hệ số chuyển đổi tốc độ phương tiện vận tải cho DYNOmite.
Trong một phiên kiểm tra công suất động cơ, có thể sử dụng chế độ Test hay Print của dyno để ghi chép quá trình trong bộ nhớ và sau đó quay chúng trở lại màn hình.
Đối với một tốc độ ghi chép đặt trưng. Thông thường sẽ phải cài đặt RPM để kích hoạt ghi chép, để bắt đầu ghi nhận dữ liệu trên vòng quay đã ấn định. Cài đặt nó bằng không (0) vì vậy sự ghi chép sẽ kích hoạt tại vòng quay đầu tiên của trục.
Có thể sử dụng “tốc độ nhỏ nhất để ghi chép dữ liệu tại đó” để ngừng việc ghi chép tự động khi trở lại tình trang chạy không cuối bài kiểm tra.
Ví dụ: trong một phiên ghi chép đặt trưng một số nhà đua xe cài đặt tốc độ động cơ kích hoạt sự ghi chép bằng không (0) và tốc độ nhỏ nhất để ghi chép dữ liệu tại đó vừa trên điểm tốc độ cam kết của họ “5000RPM”. Sau đó sự ghi chép sẽ kích hoạt khi trục bắt đầu vận hành và tiếp tục ghi chép cho đến RPM cuối cùng rớt xuống dưới 5000rpm, khi đóng hoàn toàn van tải.
Đảm bảo rằng bạn cài đặt tốc độ nhỏ nhất để ghi chép dữ liệu tại đó trên RPM kích hoạt (hay là trên RPM hộp số nếu cài đặt RPM kích hoạt =0 ). Nếu không việc ghi chép sẽ dừng ngay lập tức.
Sau khi ghi chép một quá trình kiểm tra, chạy lại dữ liệu để kiểm tra một cách cẩn thận sự vận hành từng giây.
Có thể giám sát RPM động cơ và từng toán tỉ số truyền để chắc chắn hộp số là chính xác cho từng số trưyền nhằm giữ RPM động cơ tại hay vừa dưới đỉnh công suất (để có hiệu suất cao nhất).
2.3.9 Bộ rơle công tắt ngắt (Kill Switch Relay Kit):
Mọi máy tính DYNOmite đều có một hệ thống giới hạn vòng quay tiêu chuẩn bên trong. Đường dẫn đen/ trắng của nó “SHUT-OUT” sẽ tiếp đất nếu vượt quá giới hạn vòng quay đã định sẵn. Không may, một số hệ thống đánh lửa cũng cần mở một mạch điện hay một nơi tiếp đất gần để ngắt động cơ.
Bộ rơle công tắc ngắt được thiết kế để điều chỉnh mạch giới hạn vòng quay DYNOmite tiêu chuẩn cho những ứng dụng này. Những hướng dẫn dưới đây giả định đã có một máy tính DYNOmite được mắc dây và hoạt động trên đông cơ đang kiểm tra.
1.Rơ le công tắc ngắt cần có nguồn để hoạt động ( là nguồn ắc qui 12V hay máy phát điện AC). Nếu đang sử dụng đường nối màu vàng của DYNOmite “AC INPUT” để đọc tín hiệu RPM từ máy phát điện. Tháo đường dây màu vàng từ động cơ và kết nối lại nó tại đầu dây màu vàng của bộ rơle, sau đó kết nối đuôi đường nối màu vàng của bộ rơ le tới mạch máy phát điện AC của động cơ .
Nếu không dùng một đường nối màu vàng của DYNOmite “AC INPUT” cho việc thu nhận một dạng tín hiệu RPM từ máy phát điện động cơ, gắn đầu nối màu vàng của bộ rơle vào ắc qui DC 12V.
Không nối đường nối màu vàng “AC INPUT” của DYNOmite vào ắc qui. Nó sẽ
làm nóng chảy cầu chì khi nào tác động vào giới hạn vòng quay.
2.a. Những bước sau đây cho việc ứng dụng tạo một mạch ngắt động cơ.
Đặt vào mạch tại một nơi thuận tiện. Kết nối 2 đầu dương và âm của bộ nối tới mỗi điểm cuối của bộ ngắt (điều này sẽ cho phép bạn dễ dàng khôi phục lại hệ thống khi bạn làm). Kết nối đường nối đen /đỏ từ bộ rơle tới đầu âm của bộ ngắt và dây đen/ vàng từ rơle tới đầu dương bộ ngắt. Tới bước 3.
Không nối đường đen của bộ ngắt tới bất cứ đâu.
2.b Những bước này cho việc áp dụng tiếp đất hoàn toàn để ngắt động cơ. Nối đường dẫn đen/đỏ từ rơle tới mạch ngắt bộ đánh lửa của động cơ.
Nối đường dẫn đen từ rơle tới nơi tiếp đất tốt của động cơ (có thể sử dụng
những kẹp tiếp đất hay làm một sự kết nối vĩnh cữu).
Nối đường dẫn đen/ vàng của rơle tới bất kì đâu.
3. Tháo (nếu được lắp đặt) đường nối “SHUT-OFF” đen/trắng của máy tính dữ liệu DYNOmite từ bộ đánh lửa của động cơ và lắp lại nó vào đường nối đen trắng từ bộ rơle.
4. Cài đặt một điểm giới hạn tốc độ thấp trong trình đơn hiệu chỉnh DYNOmite và vận hành động cơ để kiểm tra sự hoạt động của rơle. Nó sẽ ngăn cản động cơ vượt quá RPM cài đặt.
2.3.10 Bộ trích lọc điện từ RPM bộ hút thu (Magnetic Absorber RPM Pick- Up):
Máy tính thu nhận dữ liệu DYNOmite chuẩn có một mạch điện đồng hồ đo tốc độ góc. Mạch này làm việc bởi việc tính tổng xung điện từ bộ phận đánh lửa của động cơ hay máy phát AC. Có thể sử dụng một bộ trích lọc từ RPM bộ hút thu để lấy những số đo RPM từ một hiệu ứng từ Hall và cảm biến lắp đặt vào bộ hút thu DYNOmite.
1. Dùng mỏ lếch 13/16”, tháo chốt ren thẳng màu xanh 9/16”-18 và vòng o từ bề
mặt bộ hút thu DYNOmite.
2. Đảm bảo vòng O của nó là tại vị trí đó. Lắp lại chốt với bộ lọc trích từ và bao gồm cáp trong bộ này.
3 Lắp bộ nối 5 chân của cáp cảm biến vào phù hợp với đường nối “Jack-Shaft”
bộ dây đa năng máy tính thu nhận dữ liệu DYNOmite.
4. Giả định bộ hút thu có một nam châm đơn chuẩn. Sự cài đặt chính xác cho loại tín hiệu RPM trục “JackShaft RPM signal Type” là một tín hiệu trên vòng tại trình đơn màn hình hiệu chỉnh của DYNOmite.
2.3.11 Bơm nước di động (Rortable Water Pump):