MỤC LỤC Xây dựng phương pháp ma trận mô tả cơ cấu bánh răng vi sai phẳng
Chương 1 : Giới thiệu ........................................................................................................ 6
1.1. Tổng quan ............................................................................................................. 6
1.1.1. Cơ cấu bánh răng............................................................................................. 6
1.1.2. Phương pháp phân tích động học cơ cấu bánh răng ..................................... 10
1.2. Ưu điểm của lý thuyết Graph trong việc biểu diễn cơ cấu............................. 11
1.3. Tình hình nghiên cứu......................................................................................... 12
1.4. Nội dung đề tài.................................................................................................... 14
Chương 2: Phân tích động học cơ cấu bánh răng vi sai bằng lý thuyết Graph ............ 16
2.1. Mô tả hệ thống bánh răng vi sai bằng lý thuyết Graph ................................. 16
2.1.1. Khái niệm sơ đồ Graph ................................................................................. 16
2.1.2. Mô tả hệ thống bánh răng vi sai bằng lý thuyết Graph ................................. 19
2.2. Ứng dụng lý thuyết Graph vào phân tích động học cơ cấu bánh răng vi sai21
2.2.1. Phân tích cơ cấu thành các đơn vị cơ bản ..................................................... 23
2.2.2. Biểu diễn và phân tích các đơn vị cơ bản bằng công cụ toán ....................... 32
Chương 3: Xây dựng giải thuật phân tích và khảo sát cơ cấu bánh răng vi sai ........... 36
3.1. Cơ cấu bánh răng 1 ............................................................................................ 36
3.1.1. Mô hình bài toán ........................................................................................... 36
3.1.2. Quy trình phân tích........................................................................................ 37
3.2. Cơ cấu bánh răng 2 ............................................................................................ 39
3.2.1. Mô hình bài toán ........................................................................................... 39
3.2.2. Quy trình phân tích........................................................................................ 40
Chương 4: Ứng dụng lập trình máy tính vào phân tích động học cơ cấu bánh răng vi
sai....................................................................................................................................... 44
4.1. Lưu đồ giải thuật ................................................................................................ 44
4.1.1. Giả thiết bài toán ........................................................................................... 44
4.1.2. Nghiệm của bài toán...................................................................................... 44
4.2. Ứng dụng............................................................................................................. 46
4.2.1. Phân tích động học cơ cấu bánh răng 1......................................................... 46
4.2.2. Phân tích động học cơ cấu bánh răng 2......................................................... 48
4.3. Kết luận ............................................................................................................... 50
Chương 5: Kết luận .......................................................................................................... 52
5.1. Một số kết luận ...................................................................................................... 52
5.1.1. Phương pháp phân tích động học cơ cấu bánh răng vi sai ............................... 52
5.1.2. Ứng dụng lập trình............................................................................................ 52
5.2. Kết quả đạt đuợc của đề tài .................................................................................. 53
5.3. Hướng phát triển đề tài......................................................................................... 53
Tài liệu tham khảo............................................................................................................ 54
PHỤ LỤC A ..................................................................................................................... 56
PHỤ LỤC B...................................................................................................................... 58
DANH SÁCH CÁC HÌNH VẼ
Chương 1
Hình 1. 1.Hệ bánh răng thường phẳng ................................................................................ 6
Hình 1. 2.Hệ bánh răng thường không gian ........................................................................ 7
Hình 1. 3. Các dạng ăn khớp của hệ bánh răng vi sai phẳng............................................... 7
Hình 1. 4. Hệ bánh răng vi sai không gian. ......................................................................... 8
Hình 1. 5. Hệ bánh răng hỗn hợp ........................................................................................ 8
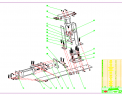
Hình 1. 6. Cơ cấu cầu xe hơi ............................................................................................... 9
Hình 1. 7. Cơ cấu bệnh cáp. ................................................................................................ 9
Hình 1. 8. Cơ cấu máy tiện trục khuỷu.............................................................................. 10
Chương 2
Hình 2. 1.Hệ bánh răng vi sai (5,7) (a) Sơ đồ kết cấu,(b) Sơ đồ Graph ............................ 18
Hình 2. 2.Sơ đồ kết cấu (a) và mạch cơ sở (b) của một cặp bánh răng ............................. 19
Hình 2. 3.Hệ bánh răng vi sai (6,9) (a) Sơ đồ kết cấu,(b) Sơ đồ Graph, (c) Nhánh cây, (d),(e),(f) và (g) các mạch cơ sở tương ứng. ..................................................................... 21
Hình 2. 4.Sơ đồ phân tích cơ cấu bánh răng vi sai ứng dụng lý thuyết Graph.................. 23
Hình 2. 5.Các dạng đơn vị bánh răng vi sai với1,2- Cặp bánh răng, 3-Tay quay. ............ 24
Hình 2. 6.Hệ bánh răng 4 khâu,1 bậc tự do (a)Sơ đồ nguyên lý,(b) Sơ đồ Graph, (c)Các
đơn vị bánh răng sau khi phân tích .................................................................................... 25
Hình 2. 7. Hệ bánh răng 6 khâu,2 bậc tự do (a)Sơ đồ nguyên lý,(b) Sơ đồ Graph, (c)Các
đơn vị bánh răng sau khi phân tích .................................................................................... 25
Hình 2. 8. Hệ bánh răng 2210-1 (a)Sơ đồ nguyên lý,(b) Sơ đồ Graph, (c)Các nhóm động học bánh răng sau khi phân tích ........................................................................................ 28
Hình 2. 9. (a) Chuỗi động học gồm 3 nhóm động học,
(b)Chuỗí song song, (c) Chuỗi hỗn hợp. ........................................................................... 30
Hình 2. 10.Cơ cấu bánh răng vi sai 6102-1(a) Sơ đồ Graph,(b)Sơ đồ Graph phân tích
thành các đơn vị bánh răng, (c) Chuỗi động học............................................................... 31
Hình 2. 11.Cơ cấu bánh răng vi sai 6206-1,(a) Sơ đồ nguyên lý,(b)Sơ đồ Graph ............ 34
Hình 2. 12. Sơ đồ truyền động của cơ cấu bánh răng 6206-1 ........................................... 34
Chương 3
Hình 3. 1.(a) Sơ đồ nguyên lý, (b) Sơ đồ Graph cơ cấu bánh răng 1 ............................... 36
Hình 3. 2.(a) Phân tích cơ cấu thành nhóm động học, (b)Chuỗi truyền động nhóm vi sai
trong cơ cấu 1. ................................................................................................................... 38
Hình 3. 3.Phân bố chuỗi truyền động của cơ cấu 1. .......................................................... 39
Hình 3. 4. (a) Sơ đồ nguyên lý, (b) Sơ đồ Graph cơ cấu bánh răng vi sai 2. .................... 40
Hình 3. 5. .(a) Phân tích cơ cấu thành các nhóm động học, (b) Chuỗi truyền động cơ cấu
2. ........................................................................................................................................ 42
Chương 4
Hình 4. 1.Lưu đồ giải thuật của chương trình phân tích cơ cấu bánh răng vi sai. ............ 45
Hình 4. 2.Sơ đồ nguyên lý cơ cấu bánh răng 1.................................................................. 46
Hình 4. 3.Sơ đồ nguyên lý cơ cấu bánh răng 2.................................................................. 49
Hình 4. 4.Sơ đồ tính toán đối với phương pháp thường dùng ( trường hợp 1). ................ 50
Hình 4. 5.Sơ đồ tính toán đối với phương pháp thường dùng ( trường hợp 2). ................ 50
DANH SÁCH CÁC BẢNG BIỂU
Chương 2
Bảng 2. 1.Trật tự truyền động của cơ cấu bánh răng 6206-1 ............................................ 34
Chương 3
Bảng 3. 1.Ma trận kết cấu của cơ cấu bánh răng 1............................................................ 37
Bảng 3. 2. Phân bố các khâu trong cơ cấu bánh răng 1..................................................... 38
Bảng 3. 3.Ma trận kết cấu của cơ cấu bánh răng 2............................................................ 40
Bảng 3. 4 .Phân bố các khâu trong cơ cấu bánh răng 2..................................................... 41
Chương 4
Bảng 4. 1.Tỉ số truyền giữa các cặp bánh răng ăn khớp trong cơ cấu 1............................ 47
Bảng 4. 2. Tỉ số truyền giữa các cặp bánh răng ăn khớp trong cơ cấu 2........................... 49
Chương 1 : Giới thiệu
1.1. Tổng quan
1.1.1. Cơ cấu bánh răng
1.1.1.1.Định nghĩa
Cơ cấu bánh răng là cơ cấu khớp cao dùng để truyền chuyển động giữa các trục quay với tỉ số truyền xác định nhờ sự ăn khớp trực tiếp giữa các bánh răng. Khi các cặp bánh răng ăn khớp liên tiếp nhau nối tiếp hoặc song song tạo thành hệ bánh răng dùng để truyền,phân phối chuyển động, hay tăng giảm vận tốc quay.
Trong đó, hệ bánh răng vi sai hay còn gọi là hệ bánh răng hành tinh là hệ thống bánh răng mà trong cứ mỗi cặp bánh răng có ít nhất một bánh có tâm quay di động. Còn ngược lại,hệ bánh răng có các tâm quay cố định gọi là hệ bánh răng thường.Trong hệ vi sai, bánh răng có tâm quay cố định gọi là bánh trung tâm, bánh răng có tâm quay di động gọi là bánh vệ tinh. Hệ vi sai có bánh trung tâm cố định được gọi là hệ bánh răng hành tinh hay cơ cấu bánh răng hành tinh. Ngoài ra, mỗi cặp bánh răng ăn khớp đều có một khâu liên kết gọi là tay quay hay tay đòn. [3]
1.1.1.2.Phân loại
(a) Hệ bánh răng thường
Hệ bánh răng phẳng là hệ bánh răng truyền chuyển động giữa các trục song song .
Hình 1. 1.Hệ bánh răng thường phẳng
Hệ bánh răng không gian là hệ bánh răng truyền chuyển động giữa các trục không song song .[8]
Hình 1. 2.Hệ bánh răng thường không gian
(b) Hệ bánh răng vi sai
Tương tự như hệ bánh răng thường, hệ bánh răng vi sai cũng chia làm hai loại: phẳng và không gian :
Hình 1. 3. Các dạng ăn khớp của hệ bánh răng vi sai phẳng
Hình 1. 4. Hệ bánh răng vi sai không gian.
Hình 1. 5. Hệ bánh răng hỗn hợp
1.1.1.3.Ứng dụng
(a) Cơ cấu vi sai - cầu xe hơi
Bộ vi sai là một thiết bị dùng để chia mô men xoắn của động cơ thành hai đường, cho phép hai bên bánh xe quay với hai tốc độ khác nhau. Có thể tìm thấy bộ vi sai ở tất cả các xe hơi và xe tải hiện đại, và đặc biệt ở các xe bốn bánh chủ động hoàn toàn. Bộ vi sai có ba nhiệm vụ chính sau:
- Truyền moment của động cơ đến các bánh xe.
- Đóng vai trò là cơ cấu giảm tốc cuối cùng trước khi moment truyền đến các bánh
- Cho phép các bánh xe quay với tốc độ khác nhau.
(b) Cơ cấu bện cáp
Hình 1. 6. Cơ cấu cầu xe hơi
Cơ cấu này cho phép bánh Z3 và cần quay cùng chiều với nhau, thường dùng trong máy bện cáp xuôi.Mỗi bánh răng Z3 mang nhiều sợi dây kim loại; chuyển động của các bánh này sẽ bện các sợi kim loại thành một nhánh còn chuyển động của cần sẽ xe các nhánh thành một sợi cáp cùng chiều.[8]
Hình 1. 7. Cơ cấu bệnh cáp.
(c) Máy tiện trục khủy
Trong cơ cấu này Z1 = Z3 nên i3C = 0 nghĩa là bánh 3 tịnh tiến không quay. Trên bánh này gắn dao tiện, khi cần C quay một góc thì tương ứng mũi dao và cổ trục khuỷu cũng quay theo.Khi đó, mũi dao trượt trên cổ trục khuỷu để thực hiện chuyển động cắt kim loại.[8]
Hình 1. 8. Cơ cấu máy tiện trục khuỷu
1.1.2. Phương pháp phân tích động học cơ cấu bánh răng
1.1.2.1.Phân tích động học cơ cấu bánh răng thường
Khi xác định được tỉ số truyền của một cặp bánh răng:
Trong đó:
là vận tốc (rad/s)
n là số vòng quay(vòng/phút) Z là số bánh răng ăn khớp
Dấu tùy thuộc vào điều kiện ăn khớp trong (+) hay ăn khớp ngoài (-)
Tiếp tục xác định tỉ số truyền của cả hệ:
Với k là số cặp bánh răng ăn khớp ngoài.Còn riêng với hệ bánh răng không gian thì k không có nghĩa và chỉ dùng quy ước dấu[8].
1.1.2.2.Phân tích động học cơ cấu bánh răng vi sai
Còn đối với hệ bánh răng vi sai,xét riêng một cặp bánh răng:
(1. 3)
Dấu + ứng với cặp bánh răng ăn khớp trong
Dấu - ứng với cặp bánh răng ăn khớp ngoài
Công thức tổng quát đối với hệ bánh răng vi sai gồm hai cặp là:
(1. 4)
Với hệ bánh răng vi sai không gian thì dấu (-1)k cũng không có nghĩa mà xét theo chiều mũi tên qui ước.Đối với công thức trên đặt giả thiết là các vận tốc gốc quay cùng chiều nên khi vận tốc nào đó ngược chiều chuyển động thì mang dấu âm ( ví dụ như -
Với phương pháp phân tích hệ thống bánh răng được trình bày ở trên,có thể nhận thấy một số ưu điểm như : dễ áp dụng,trực quan, phân tích kết quả cụ thể cho từng hệ bánh răng. Tuy nhiên, với sự đa dạng hệ thống bánh răng được sử dụng rộng rãi và phổ biến trong nhiều cơ cấu nên cần một phương pháp mang tính hệ thống, tổng quát để có thể phân tích với độ phức tạp cao. Điều đó đòi hỏi sự hỗ trợ về khả năng lập trình trên máy tính. Một trong các phương pháp được các nhà nghiên cứu biết đến là lý thuyết Graph- phần nào đáp ứng được các yêu cầu trên.
1.2. Ưu điểm của lý thuyết Graph trong việc biểu diễn cơ cấu
Dựa vào khả năng lập trình của máy tính để mô hình hóa cơ cấu,lý thuyết Graph nêu ra ở đây có thể khắc phục được nhược điểm này,lần đầu tiên được ứng dụng để tổng hợp cơ cấu năm 1964 [2].Mỗi khâu trong cơ cấu được biểu diễn bằng một nút và mỗi khớp được thay bằng một cạnh trong họa đồ Graph. Khi biểu diễn cơ cấu từ dạng sơ đồ kết cấu sang họa đồ Graph, tất cả các tính chất, liên kết của cơ cấu đều được giữ nguyên. Khi dùng họa đồ Graph để biểu biễn một cơ cấu, có những ưu điểm sau:
- Nhiều tính chất mang tính liên kết của họa đồ Graph có khả năng ứng dụng. Như phương trình Euler biểu diễn mối liên hệ giữa các thành phần kết cấu,đặc tính của cơ cấu.
- Vì mỗi cơ cấu có tính chất về mặt kết cấu là duy nhất mà những điểm giống và khác nhau giữa hai cơ cấu có thể nhận biết trực quan khi sử dụng họa đồ Graph.Chính vì vậy mà nó còn được dùng như một phương pháp liệt kê.
- Graph là một công cụ hữu ích trong việc ứng dụng các hỗ trợ từ máy tính khi tổng hợp và phân tích cơ cấu.
Họa đồ Graph là tập hợp các đường thẳng,điểm liên kết với nhau theo các quy luật nhằm thể hiện các loại kết cấu bằng một phương pháp mới khác với các cách truyền thống. Nó có thể diễn tả các quy luật lắp ráp,chuyển động qua đó hỗ trợ việc phân tích và tổng hợp cơ cấu. [3]
1.3. Tình hình nghiên cứu
Trên thế giới, lí thuyết Graph đã được nghiên cứu và ứng dụng khá nhiều trong
lĩnh vực cơ khí,đặc biệt là trong việc tổng hợp,phân tích cơ cấu.[4],[5],[6]
(a) Đề tài luận văn thạc sỹ “Systematic Methodologies for the Automatic Enumeration of the Topological Structures of Mechanisms“(Hệ thống các phương pháp liệt kê tự động cấu trúc liên kết) của tác giả Hsin I-Hsieh, đại học Maryland( University of Maryland) trình bày một số thuật toán mới đối với phép liệt kê cấu trúc liên kết của kết cấu. Ngoài ra, tác giả còn bổ sung một số định nghĩa về họa đồ Graph đối ngẫu ( bao gồm cả đối ngẫu của họa đồ thu gọn) cũng như mối liên hệ giữa chúng. Các thuật toán mà tác giả đề cập đến là phương pháp sử dụng ma trận nút-nút liền kề;thứ hai là rút ra họa đồ chính tắc từ các họ họa đồ thu gọn bằng cách sắp xếp các chuỗi nút bậc hai.Cuối cùng là thuật toán dùng ma trận nút cạnh liền kề thay cho ma trận nút-nút liền kề.Họa đồ đối ngẫu của họa đồ chính tắc rút ra từ họa đồ họa đồ đố ngẫu của họa đồ thu gọn. Rồi từ họa đồ đối ngẫu đó mới thiết lập nên họa đồ chính tắc. Trong phương pháp này, họa đồ đối ngẫu của họa đồ thu gọn đóng vai trò như cơ sở dữ liệu. Ở đây, hàm đa thức đặc trưng được sử dụng để nhận dạng các họa đồ đẳng cấu.Bởi vì chỉ có hai họa đồ rút ra từ cùng một họa đồ thu gọn mới đẳng cấu với nhau nên nếu cần thiết thì xét trong một họ họa đồ thu gọn khi xem xét
hai họa đồ chính tắc có đẳng cấu hay không. Vấn đề tồn tại là hai họa đồ không đẳng cấu lại xuất phát từ các hàm đa thức đặc trưng tương đồng. Cho nên phương pháp thứ hai hiệu quả hơn và là công cụ hữu ích cho các nghiên cứu
sau này.Nó cho phép thiết lập một atlas bằng cách liệt kê và vẽ tự động họa đồ
chính tắc và các họa đồ tương ứng.
(b) Đề tài nghiên cứu “Enumeration and Automatic Sketching of Epiccyclic – Type Automatic Transmission Gear Train” (Phương pháp liệt kê và vẽ tự động hệ truyền động bánh răng vi sai)của tác giả Goutam Chatterjee, đại học Maryland ( University of Maryland). Tác giả nghiên cứu một thuật toán nhằm xác định hai họa đồ Graph có đẳng cấu hay không.Do một vài phương pháp dựa vào mối liên hệ giữa ma trận liền kề nút-nút và hàm đa thức đặc trưng có tính hiệu quả không cao.Với phương pháp này cho phép người thiết kế có thể tính toán hệ bánh răng vi sai đáp ứng các điều kiện ràng buộc về động học và động lực học,tránh các khâu thừa và đảm bảo khả năng chuyển động của hệ. Ý tưởng chính là mã hóa mỗi họa đồ bằng một bộ mã riêng biệt, khi đó có thể
dựa vào các bộ mã này mà phân biệt hai họa đồ có đẳng cấu hay không.
(c) Tác giả S.N. Mogalapalli ứng dụng lí thuyết Graph vào việc tìm tỉ số truyền tối ưu được trình bày trong luận văn thạc sỹ “Optimization of Gear Ratios for Epicyclic Gear Train Transmission” (Tối ưu hóa tỉ số truyền hệ bánh răng vi sai) đại học Maryland ( University of Maryland). Nhằm hỗ trợ người thiết kế và giảm thiểu sự phụ thuộc vào kinh nghiệm, một số nghiên cứu thực tế đã
hoàn thành trong vài thập kỷ gần đây dựa trên máy tính nhằm hệ thống hóa việc thiết kế cơ cấu.Luận văn này liên quan đến phân loại hệ thống bánh răng vi sai có khả năng ứng dụng trong xe hơi. Mục tiêu của đề tài là phát triển một phương pháp nhằm thể hiện các đặc tính của hệ bánh răng vi sai; áp dụng kỹ thuật tối ưu nhằm tìm tỉ số truyền tối ưu cho một bộ bánh răng vi sai của xe
hơi-đây cũng là một giai đoạn phân tích và thiết kế cơ cấu xe hơi;và phát triển giao diện tương tác dựa trên nền tảng windows dễ dùng nhằm truy cập thông
tin. Hệ thống dựa trên nền tảng window này giúp người thiết kế làm việc hiệu quả và có năng suất.
(d) Các tác giả L.C. Schmidt, H.Shetty và S.C.Chase trình bày một quy tắc về lí thuyết Graph ứng dụng tổng hợp cơ cấu trong bài báo “ Một quy tắc lí thuyết
Graph để tổng hợp cơ cấu ”( A graph grammar approach for structure synthesis of mechanisms)- thuộc tạp chí Journal of Mechanical Design. Bài
báo này đưa ra một quy tắc chung trong việc tổng hợp cơ cấu. Quy tắc này dựa trên thuật toán được rút ra từ các cơ sở lí thuyết có sẵn.Mục đích là thêm vào họa đồ các nút, chu tuyến nhằm thu được một cơ cấu có kết cấu mới thỏa mãn ràng buộc. Nó không những đáp ứng được các thuật toán tuyến tính mà còn phát hiện ra được các họa đồ đẳng cấu. Nhóm tác giả cũng đưa quy tắc này vào ứng dụng để tổng hợp hệ bánh bánh răng vi sai và đưa ra một tập atlas liệt kê, phân loại các dạng kết cấu theo từng nhóm họa đồ.
Các đề tài nghiên cứu trình bày ở trên đã tạo một hướng đi mới trong việc phân tích;tổng hợp cơ cấu và đưa ra các cơ sở để phân loại, liệt kê cũng như nhận dạng các hệ bánh răng thông qua hàm đa thức đặc trưng. Dựa trên cơ sở phân loại đó, các nghiên cứu tiếp sau đó đi sâu vào ứng dụng như sử dụng lí thuyết để mã hóa mỗi hệ bánh răng thành một bộ mã riêng biệt tạo thành một hệ thống phân loại và vẽ tự động. Hơn nữa, lý thuyết còn hỗ trợ để tính toán tỉ số truyền tối ưu cho các cặp bánh răng và bước đầu đưa ra các phương hướng nhằm phân tích động học của cả hệ bánh răng.
1.4. Nội dung đề tài
Các nghiên cứu đi trước đã chỉ ra nền tảng cơ sở cũng như các thuật toán của lý thuyết đồ thị Graph có thể ứng dụng trong việc phân tích và tổng hợp cơ cấu cũng như phương hướng cụ thể.Ở đề tài này, tác giả dựa trên mô hình lý thuyết Graph để mô tả cơ cấu,xây dựng giải thuật và quy trình tính động học cho hệ thống bánh răng dựa trên các mô hình Graph đã được xây dựng và lập trình.Cụ thể là chương 2 trình bày cơ sở lý thuyết Graph và quá trình phân tích các hệ bánh răng cần khảo sát.Chương 3 đi vào xây
Chương 2: Phân tích động học cơ cấu bánh răng vi sai
bằng lý thuyết Graph
2.1. Mô tả hệ thống bánh răng vi sai bằng lý thuyết Graph
2.1.1. Khái niệm sơ đồ Graph
[3].Sơ đồ Graph là tập hợp các đường thẳng,điểm liên kết với nhau theo các quy luật nhằm thể hiện các loại kết cấu bằng một phương pháp mới khác với các cách truyền thống. Nó có thể diễn tả các quy luật lắp ráp,chuyển động qua đó hỗ trợ việc phân tích và tổng hợp cơ cấu. Sơ đồ graph bao gồm một tập hợp các nút (hay điểm) liên kết với một tập hợp các cạnh. Thông thường, người ta ký hiệu G là sơ đồ Graph, V là tập hợp các nút, và E là tập hợp các cạnh. Trong đó, v là số nút, e là số cạnh trong một sơ đồ Graph G( v,e).
Mỗi cạnh liên kết với hai nút gọi là điểm cuối i và j,khi đó, cạnh đó sẽ được ký
hiệu là . Một cạnh được gọi là gắn liền với một nút nếu nút đó là điểm cuối của cạnh tương ứng.Hai điểm cuối của một cạnh được hiểu là liền kề với nhau. Còn hai cạnh gọi là liền kết với nhau nếu chúng gắn liền với cùng một nút. Hai nút được gọi là liên kết với nhau nếu có một đường liên kết giữa chúng. Đường liên kết này có thể gồm nhiều nút và cạnh khác nhau. Điều đó có nghĩa là hai nút liên kết không nhất thiết phải liền
kề nhau. Một sơ đồ Graph G được gọi là liên kết nếu mỗi nút trong G liên kết với các
nút khác ít nhất qua một đường liên kết. Sơ đồ Graph còn có thể được trình bày ở dạng ma trận. Nhờ đó, người ta có thễ dễ dàng hơn trong việc phân tích,liệt kê cũng như nhận dạng cơ cấu.
Dựa trên khái niệm đó, lí thuyết Graph đưa ra các định nghĩa cơ bản được sử dụng như các công cụ để phân tích động học cơ cấu. Một trong số đó là các dạng ma trận dùng để biểu diễn sơ đồ Graph: ma trận liền kề nút – nút, ma trận tương quan nút – cạnh, ma trận mạch ; hàm đa thức đặc trưng và các khái niệm về mạch cơ sở…
2.1.1.1.Ma trận liền kề nút – nút (Adjacency matrix vertex-vertex)
Trong ma trận liền kề nút – nút A, các nút được đánh số từ 1 đến v. Khi đó,
Trong đó, aij biểu trưng cho phần tử ở hàng i, cột j với A là ma trận đối xứng vuông
v x v, có đường chéo bằng 0. Mỗi sơ đồ Graph chỉ thiết lập duy nhất một ma trận A
hay nói cách khác từ ma trận liền kề A cho trước có thể lập lại sơ đồ Graph tương ứng.
Đây cũng là một công cụ để phân biệt các sơ đồ Graph đẳng cấu với nhau hay không.
2.1.1.2.Ma trận tương hỗ nút – cạnh ( Incidence matrix vertex-edge)
Các nút được đánh số từ 1 đến v, trong khi các cạnh từ 1 đến e. Ma trận tương hỗ nút - cạnh B kích thước v x e ,mỗi hàng tương ứng với một nút và mỗi cột tương ứng với một cạnh ;được xác định như sau:
So với ma trận liền kề A, ma trận tương hỗ B cũng được xác định duy nhất từ một sơ đồ Graph cho trước nhưng về mặt cấu trúc nó luôn tồn tại hai phần tử khác 0 trong cùng một cột do mỗi cạnh đều chứa hai điểm nút cuối.
2.1.1.3.Ma trận mạch ( Circuit matrix )
Các mạch được đánh số từ 1 đến l, trong khi các cạnh từ 1 đến e. Ma trận mạch C kích thước l x e ,mỗi hàng tương ứng với một mạch và mỗi cột tương ứng với một cạnh ;được xác định như sau:
Ma trận này so với hai ma trận liền kề và ma trận tương hỗ không đưa ra đầy đủ tính chất của một sơ đồ Graph, và nó cũng không đại diện hoàn toàn cho sơ đồ Graph đó.
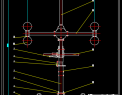
Ví dụ như ở hình 2.1, sơ đồ Graph tồn tại 3 cạnh ăn khớp e25 ,e35 ,và e45. Khi lần lượt thêm các cạnh này vào nhánh cây thì ta có 3 mạch cơ sở (2,5)(1) ; (3,5)(1 ) và (4,5)(1).
Hình 2. 1.Hệ bánh răng vi sai (5,7) (a) Sơ đồ kết cấu,(b) Sơ đồ Graph
Ví dụ như, đối với hệ bánh răng như hình 2.1 trên bằng cách thiết lập ma trận liền kề
nút-nút A,ma trận tương hỗ nút – cạnh B, có thể làm rõ vấn đề: Ma trận A có thể viết như sau:
Khi đó, dựa vào ma trận, có thể xác định được đặc tính liên kết giữa các khâu với nhau. Cụ thể, ở ma trận A, tổng các phần tử ở mỗi hàng ( hoặc cột) chính là số bậc của nút đó. Ví dụ như số bậc của nút 1 là 4 (v1 liền kề với 4 nút khác). Còn ma trận B xác định lần lượt hai nút cuối của mỗi cạnh.
2.1.1.4.Mạch cơ sở (Fundamental circuit)
...............
Chương 5: Kết luận
5.1. Một số kết luận
5.1.1. Phương pháp phân tích động học cơ cấu bánh răng vi sai
Đầu tiên như đã trình bày ở chương 2, phương pháp này dựa trên ma trận để mã hóa cơ cấu bánh răng. Nhờ vào đặc điểm của lý thuyết Graph là có thể chuyển từ dạng hình vẽ (sơ đồ Graph) sang công cụ toán học (ma trận) và ngược lại nên có thể xây dựng giải thuật phân tích tự động. Tuy nhiên, bước phân tích đầu tiên khi chuyển từ sơ đồ nguyên lý thành sơ đồ Graph có một nhược điểm là sơ đồ Graph không thể hiện
tính chất ăn khớp của cặp bánh răng (ăn khớp trong hay ăn khớp ngoài). Do đó, phải thêm vào dấu của các tỉ số truyền ở thông tin đầu vào trong quá trình phân tích.
Ngoài ra, việc phân tích đi từ khâu chia cơ cấu bánh răng thành những nhóm đơn vị nhỏ hơn mà việc phân tích động học các nhóm này chính là nhiệm vụ trọng tâm trong suốt quá trình.Khi chia nhỏ cơ cấu tạo sẽ điều kiện cho việc phân tích rõ ràng hơn về mặt kết cấu ( phân loại và nhận dạng các nhóm vi sai trong cơ cấu) và mặt động học (thiết lập các ràng buộc liên quan trong chính nhóm đơn vị đó và giữa các
nhóm đơn vị với nhau). Lúc này, việc mã hóa các nhóm đơn vị cũng dễ thực hiện hơn.
Cuối cùng là mối liên quan giữa việc quản lý các khâu trong cơ cấu và thành lập hệ phương trình động học. Từ các công trình nghiên cứu của các tác giả khác, đề tài này tóm gọn lại trong việc phân bố và quản lý các khâu cụ thể cho cơ cấu bánh răng vi sai. Các phương pháp đã nêu của những tác giả khác đã chỉ ra cách phân loại các khâu để thành lập chuỗi truyền động cho cả cơ cấu.
5.1.2. Ứng dụng lập trình
Vì ngôn ngữ lập trình Matlab và phương pháp phân tích dựa trên sơ đồ Graph đều được xây dựng dựa trên các thuật toán về ma trận nên có những thuận lợi nhất định để thiết lập giải thuật phân tích. Hơn nữa, Matlab là một ngôn ngữ bậc cao và môi trường tương tác cho phép tiến hành các nhiệm vụ tính toán có cường độ lớn nhanh với rất
nhiều các nhiệm vụ thông thường liên quan tới việc giải quyết các vấn đề một cách số
học. quan tới việc giải quyết các vấn đề một cách số học.
5.2. Kết quả đạt đuợc của đề tài
Trong quá trình thực hiện luận văn, một số kết quả đạt được như sau:
- Tìm hiểu lý thuyết Graph và ứng dụng trong việc tính động học.
- Xây dựng phương pháp ma trận mô tả cơ cấu bánh răng vi sai phẳng.
- Thiết lập giải thuật và ứng dụng vào lập trình máy tính để phân tích tự động cơ cấu
bánh răng bằng ngôn ngữ lập trình.
- File Matlab lập trình ứng dụng vào phân tích động học hai cơ cấu bánh răng cụ
thể.
5.3. Hướng phát triển đề tài
Trong số những ưu điểm của phương pháp lý thuyết Graph được trình bày ở phần trên, khả năng lập trình là một điều kiện thuận lợi để ứng dụng thành công phương pháp này vào việc tính động học cơ cấu bánh răng vi sai phẳng. Ngoài ra, khả năng ứng dụng của nó không chỉ dừng lại ở đây mà còn có thể tiếp tục phát triển ý tưởng này vào hệ bánh răng vi sai không gian. Mặc dù cơ cấu không gian có những tính chất
khác biệt so với cơ cấu phẳng nhưng tính động học vẫn không thay đổi. Do đó,hy vọng những cơ sở lý thuyết đã được trình bày trong đề tài này sẽ tạo nền tảng phát triển cho những nghiên cứu tiếp theo.
Tài liệu tham khảo
[1] F.Buchsbaum and F.Freudenstein.” Synthesis of Kinematic Structure
of Geared Kinematic Chains and other Mechanisms,” Journal of Mechanisms, vol.5, pp.
357–392,1970.
[2]F.R.E. Crossley.”A Contribution to Grubler’s Theory in the Number Synthesis of Plane Mechanisms,” ASME Transaction, Journal of Engineering for Industry, vol.86B, pp.1-8,1964.
[3]L.W.Tsai.Mechanism Design : Enumeration of Kinematics Structures
According to Function. Boca Raton, Florida: CRC Press LLC,2001.
[4] H.I.Hsieh.”Systematic Methodologies for the Automatic Enumeration of the Topological Structures of Mechanisms,”M.S.thesis, University of Maryland, United States of America,1992.
[5] G. Chatterjee.”Enumeration and Automatic Sketching of Epiccyclic –Type Automatic Transmission Gear Train,” M.S.thesis, University of Maryland, United States of America,1993.