ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ VÀ CHẾ TẠO MÁY BAY ĐIỀU KHIỂN TỪ XA ỨNG DỤNG TRONG CỨU HỘ
MỤC LỤC
NHIỆM VỤ ĐỒ ÁN TỐT NGHIỆP. i
LỜI NHẬN XÉT CỦA GIÁO VIÊN HƯỚNG DẪN.. ii
LỜI CAM KẾT.. iii
LỜI CÁM ƠN.. iv
MỤC LỤC.. v
DANH SÁCH HÌNH.. vii
Chương 1 GIỚI THIỆU.. 1
1.1 Tính cấp thiết của đề tài:1
1.2 Ý nghĩa khoa học và thực tiễn của đề tài:1
1.3 Mục tiêu nghiên cứu của đề tài:1
1.4 Đối tượng và phạm vi nghiên cứu:2
1.4.1 Đối tượng:2
1.4.2 Phạm vi:2
1.5 Phương pháp nghiên cứu:2
1.5.1 Cơ sở pháp luận:2
1.5.2 Các phương pháp nghiên cứu cụ thể:2
1.6 Kết cấu của ĐATN.. 3
Chương 2 TỔNG QUAN NGHIÊN CỨU ĐỀ TÀI. 4
2.1 Các định nghĩa:4
2.2 Giới thiệu về thiết bị bay. 4
2.2.1 Khung hướng lịch sử và đề tài nghiên cứu:4
2.2.2 Phân loại thiết bị bay:4
2.2.3 Tính năng của thiết bị bay:6
2.2.4 Chất lượng của thiết bị bay:6
2.2.5 Chọn lựa thiết bị bay phù hợp với công tác cứu hộ. 7
2.2.6 Đặc điểm của thiết bị bay. 7
2.3 Đối tượng và phương pháp nghiên cứu. 7
2.3.1 Đối tượng nghiên cứu:7
2.3.2 Phương pháp nghiên cứu và các bước tiến hành:7
Chương 3 CƠ SỞ LÝ THUYẾT.. 8
3.1 Lý thuyết chuyên ngành. 8
3.2 Lý thuyết bên ngoài thực tiễn. 8
3.3 Một số công thức tham khảo liên quan để tính:8
Chương 4 CƠ CẤU VÀ CHỨC NĂNG CÁC BỘ PHẬN.. 10
4.1 Cơ cấu của thiết bị bay. 10
4.2 Chức năng và vật liệu để làm nên nó.11
4.2.1 Tay điều khiển tự động, (còn được gọi là TX)11
4.2.2 Động cơ quay.13
4.2.3 Thân flycam.. 14
4.2.4 Mạch điều khiển.15
4.2.5 Cánh quạt.17
4.2.6 Bộ phận giữ và cho rơi áo phao :18
4.2.7 Chân đỡ.18
4.2.8 Bộ điều tốc (còn được gọi tắc là ESC).19
4.2.9 Bộ điều khiển nguồn điện vào flycam (còn gọi tắc la PMU ).20
4.2.10Định vị GPS. 21
4.2.11Cổng USB đưa phần mêm vao trong flycam.. 22
4.2.12Bộ thu tính hiệu trên flycam (còn gọi tắc là RX) .23
4.2.13Bộ điều khiển sevol24
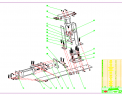
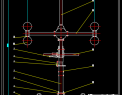
4.3 Cơ cấu nâng hạ cứu hộ :25
4.3.1 Công dụng của cơ cấu nâng hạ :25
4.3.2 Cấu tạo các bộ phận trên cơ cấu nâng hạ. 25
4.4 Nguyên lý hoạt động của flycam.. 31
Chương 5 TÍNH TOÁN CHI TIẾT CỦA CÁC BỘ PHẬN TRÊN MÁY VÀ ĐỘNG CƠ VÀ ĐIỀU KIỆN BỀN CỦA VẬT LIỆU.. 32
5.1 TRỌNG LƯỢNG ,KÍCH THƯỚC ,NHIỆT ĐỘ VÀ NGUỒN ĐIỆN TRÊN FLYCAM 32
5.1.1 Trọng lượng. 32
5.1.2 Kích thước. 32
5.1.3 Nhiệt độ hoạt động. 33
5.1.4 Điện. 33
5.2 TÍNH TOÁN CÁC LỰC CẦN THIẾT TRÊN VÀ ĐỂ CHỌN CÁC THIẾT BỊ PHÙ HỘP CHO MÔ HÌNH MAY BAY.33
5.3 CÁC CHỈ SỐ CẦN BIẾT KHI THIẾT KẾ MÔ HÌNH CỨU HỘ MÁY BAY ĐIỀU KHIỂN TỪ XA .33
5.3.1 Tỉ lệ lực kéo – trọng lượng. 35
5.3.2 Tải trọng cánh. 35
5.3.3 Số vòn tua của động cơ. 36
5.3.4 Đồ điện – điện áp – dòng điện làm việc của máy bay. 36
5.3.5 Chọn pin cho mô hình :36
5.3.6 Tính công suất thất thoát nhiệt của pin Trong con flycam có những thiết bị tiu thụ điện như servo , gyro , bộ thu ( rx) , hay bộ điều tốc (esc) , rồi động cơ….37
5.3.7 Tính momen xoắn trên trục động cơ điện :38
5.3.8 Tính lực nâng. 39
5.3.9 TÍNH TOÁN CÁC LỰC TRONG CƠ CẤU NÂNG HẠ.. 40
Chương 6 THỬ NGHIỆM MÔ HÌNH BAY.. 45
6.1 Thử nghiệm và khả năng bay của mô hình. 45
6.2 Đánh giá. 45
Chương 7 TÍNH GIÁ THÀNH.. 46
7.1 Giá thành của máy được tính theo bảng sau :46
7.2 KẾT LUẬN – ĐỀ NGHỊ47
7.2.1 Thông qua quá trình làm đồ án, chúng em đã đạt được những kết quả sau 47
7.2.2 Kiến nghị47
7.3 Tài liệu tham khảo. 47
DANH SÁCH HÌNH
Hình 2. 1 Máy bay 4 cánh. 5
Hình 2. 2 Máy bay 6 cánh. 5
Hình 2. 3 Máy bay 8 cánh. 6
Hình 3. 1 Tay điều khiển………………………………………………………………...11
Hình 4. 1 Động cơ motor………………………………………………………………...13
Hình 4. 3 Mạch chính nhìn từ bên trái qua. 15
Hình 4. 4 Mạch chính nhìn từ bên phải qua. 16
Hình 4. 5 Điều chỉnh tốc độ. 20
Hình 4. 6 Bộ điều khiển xử lý nguồn điện. 21
Hình 4. 7 Định vị GPS. 23
Hình 4. 8 Đèn LED và cổng USB.. 24
Hình 4. 9 Mạch chính từ bên trái qua. 25
hình 4. 10 Bộ thu tín hiệu. 26
Hình 4. 11 Động cơ servo dùng để nâng hạ. 27
Hình 4. 12 Đế của động cơ nâng hạ. 29
Hình 4. 13 Thanh giử. 30
Hình 4. 14 Thanh truyền mo men. 31
Hình 4. 15 Thanh V để giử và để vật rơi xuống. 31
Hình 4. 16 Ống lót32
Hình 4. 17 Pát32
Hình 4. 18 3D.. 33
Hình 4. 19 3D.. 34
Hình 5. 1 Bảng thông số…………………………………………………………………38
Hình 5. 2 Khi động cơ chưa hoạt động. 47
Hình 5. 3 Khi động cơ quay 1 gốc 30. 48
Hình 5. 4 Khi động cơ quay được gốc 50. 49
Hình 5. 5 Bảng giá thành vật liệu. 53
Chương 1 GIỚI THIỆU
1.1 Tính cấp thiết của đề tài:
-Hiện nay ngành kỹ thuật điều khiển và tự động hóa đã rất phát triển con người có thể tạo ra được những loại máy móc thiết bị rất hiện đại và hầu như mọi việc sản xuất từ tay chân của con người ngày xưa thì ngày nay mọi công việc sản xuất, chế tạo đều có thể chuyển sang tự động.Nếu máy móc hiện đại và được tự động hóa thi nó sẽ giúp cho chúng ta có được các sản phẩm đạt độ chính xác cao, giúp tăng số lượng trong sản xuất và rất nhiều trong các lĩnh vực khác nữa.
-Flycam hay còn gọi là Drone: là một thiết bị UAV (Unmaned Aerial Vihecle - thiết bị không người lái).
- flycam là một thiết bị điều khiển tự động từ xa, hiện nay flycam được sử dụng rộng rãi và phổ biến ở các nước phát triển, flycam được coi như một công cụ để con người sử dụng trong các trường hợp như: quay các clip có góc quay khó trên không, chụp ảnh, dựa vào khả năng điều khiển từ xa của con người nên em đã suy nghĩ và em đang sử sụng tính năng bay của flycam để dùng trong một số trường hợp cứu hộ đơn giản… Cụ thể là em đang làm flycam có thể kéo áo phao bay đến những nơi có người đang bị đuối nước, sau đó chúng em dùng tính hiệu điều khiển từ xa để tạo ra hiệu lệnh để flycam thả áo phao đến ngay người cần cứu để họ có thể bám vào phao mà thoát khỏi đuối nước.
1.2 Ý nghĩa khoa học và thực tiễn của đề tài:
- Nếu sản phẩm của chúng em tạo ra thành công như mong đợi thì chúng em hy vọng nó sẽ được phát triển ra thị trường để có thể giúp ích cho con người trong một số trường hợp cấp bách và cần thiết.Đồng thời giúp chúng em có thêm hiểu biết và có thể tiếp cận gần hơn với ngành tự động hóa.
- Tạo điều kiện, tiền đề cho người nghiên cứu có thể phát triển kỹ năng, kiến thức của mình và ứng dụng chúng vào thực tiễn.
1.3 Mục tiêu nghiên cứu của đề tài:
- Củng cố kiến thức đã học, thu thập các ý kiến thực tiễn trong quá trình làm.
- Tìm ra được nguyên lý cơ cấu hoạt động bay
- Tính toán các thông số yêu cầu, kỹ thuật của thiết bị bay.
- Chế tạo được hệ thống giữ và thả áo phao.
- Có được định hướng phát triển đưa sản phẩm ra thực tiễn sản xuất.
1.4 Đối tượng và phạm vi nghiên cứu:
1.4.1 Đối tượng:
-Các con sông rộng có dòng nước chảy xiết có nguy cơ ảnh hưởng đến đời sống người dân.
- Máy điều khiển từ xa giữ và thả áo phao cứu hộ.
- Các hồ bơi có diện tích rộng khoang 500m2
1.4.2 Phạm vi:
-Do thời gian nghiên cứu ít, kiến thức của chúng em có hạn, nên để tài xin phép được giới hạn trong thiết kế thiết bị cứu hộ dùng để giữ và thả áo phao.
1.5 Phương pháp nghiên cứu:
1.5.1 Cơ sở pháp luận:
Phương pháp nghiên cứu là những nguyên tắc và cách thức hoạt động khoa học nhằm đạt đến chân lý khách quan dựa trên cơ sở của sự chứng minh khoa học. Theo định nghĩa này cần phải có những nguyên tắc cụ thể và dựa theo đó các vấn đề được giải quyết.
Nghiên cứu quy trình công nghệ và cơ cấu điều khiển nâng hạ của máy bay, từ đó đưa ra các phương pháp, nguyên lý hoạt động để giải quyết được các vấn đề.
1.5.2 Các phương pháp nghiên cứu cụ thể:
- Phương pháp khảo sát thực tế: tìm hiểu xem trên thị trường có máy này hay không?
-Phương pháp thu thập dữ liệu: lấy số liệu về năng suất làm việc của các máy khác hiểu quả như thế nào khi thực hiện thủ công trong việc cứu người thông qua việc khảo sát thực tế. Bấm thời gian để lấy số liệu về các công đoạn nâng hạ khi chịu tải khác nhau từ đó tính toán được năng suất cần thiết để cung cấp đủ tải cho phù hợp không làm hư máy và phải đạt được năng suất tốt nhất.
-Phương pháp phân tích đánh giá: dựa vào dữ liệu đã thu thập được, tham khảo ý kiến của các anh có kinh nghiệm đi trước và ý kiến thực tế của người dân, và các chuyên gia để phân tích và đánh giá nhu cầu trong việc chế tạo một loại máy có khả năng thay thế được sức lao động của con người nhưng vẫn đảm bảo năng suất cần thiết.Phân tích
tìm ra các giải pháp công nghệ trong chế tạo, từ đó đưa ra quy trình để hoàn thiện đồ án một cách hiệu quả nhất.
- Phương pháp tổng hợp: sau khi đã có đầy đủ thông tin, số liệu cần thiết và những gì được chứng kiến trong thực tế kết hợp với kiến thức chuyên ngành của chúng em, chúng em đã đưa ra những nhận xét, đánh giá khách quan để từ đó đề xuất quy trình hợp lí để cứu người gặp sự cố, và chế tạo thành công mô hình với nguyên lý điều khiển nâng hạ cung cấp nhiên liệu hợp lý nhất.
- Phương pháp mô hình hóa: là mục tiêu chính của đề tài, tạo cho chúng em có cơ hội để ôn lại kiến thức đã học và học hỏi được nhiều kinh nghiệm trong thực tiễn. việc chế tạo mô hình giúp kiểm nghiệm được lý thiết, và sữa chữa những chỗ sai mà phương pháp lý thuyết không thể thấy được.
1.6 Kết cấu của ĐATN
ĐATN bao gồm 7 chương:
Chương 1 Giới thiệu về đề tài và một số phương pháp, cách thức thực hiện đề tài.
Chương 2 Trình bày tổng quan nghiên cứu của đề tài, bao gồm giới thiệu về máy kết cấu của máy, các nghiên cứu liên quan.
Chương 3 Trình bày về cơ sở lý thuyết để thực hiện đề tài
Chương 4 Đưa ra phương hướng và các giải pháp để giải quyết vấn đề, bao gồm các nguyên lý nâng hạ và quy trình thực hiện nâng hạ.
Chương 5 Tính toán chi tiết công suất động cơ, các bộ phận của máy, điều kiện bền …
Chương 6 Trình bày về việc chế tạo mô hình nâng hạ, đánh giá
Chương 7 Tính giá thành
Chương 2 TỔNG QUAN NGHIÊN CỨU ĐỀ TÀI
2.1 Các định nghĩa:
Máy tự động là máy tự động hoàn toàn, thao tác trên sản phẩm đến lấy sản phẩm ra. Chính vì thế con người không phải tốn công sức trong quá trình hoàn thiện sản phẩm.
Vai trò và ý nghĩa của tự động hóa quá trình cứu hộ:
- Tự động hóa nếu được đưa vào áp dụng cho cứu hộ sẽ giúp cho người cứu hộ rất đỡ tốn hao sức khỏe, công việc cứu hộ sẽ được thực hiện nhanh chóng hơn, tăng thêm được nhiều cơ hội để cứu người.
- Tự động hóa giúp cải tiến cho các công tác cứu hộ, giúp quan sát những nạn nhân từ xa để nhanh chóng giải cứu được người bị nạn.
2.2 Giới thiệu về thiết bị bay
2.2.1 Khung hướng lịch sử và đề tài nghiên cứu:
- Nghiên cứu, thiết kế và chế tạo ra thiết bị bay phục vụ cứu hộ nhằm giúp giảm sức lao động của người cứu hộ, giúp người cứu hộ có thể quan sát từ xa để phát hiện ra những người đuối nước để kịp thời cứu giúp.
2.2.2 Phân loại thiết bị bay:
Thiết bị bay phục vụ cứu hộ được thiết kế dựa theo nhu cầu cũng như yếu tố phù hợp với người cứu hộ.
Thiết bị bay bao gồm: loại có 4 cánh, loại 6 cánh loại 8 cánh.
Loại 4 cánh: Loại máy bay nhỏ,gọn có 4 cánh, 4 động cơ, công suất nhỏ thường dùng để bay quay phim chụp ảnh, ở không gian chật hẹp , thung lũng, hóc đá, hoặc quay phim chụp hình trên cao. Dễ mang theo khi đi dã ngoại, đi du lịch.
Hình 2. 1 Máy bay 4 cánh (4 wing aircraft)
Loại 6 cánh: Là loại máy có khung sườn lớn hơn nhưng cũng không quá rườm rà, có 6 cánh , 6 động cơ. Công suất lớn hơn và phụ thuộc vào loại motor mà mình sử dụng. Loại 6 cánh thường sử dụng cho việc thăm đồng khi tích hợp thêm camera, sử dụng trong việc cứu hộ ngoài biển, cũng có thể làm thiết bị quay phim chụp ảnh.
Hình 2. 2 Máy bay 6 cánh (6 wing aircraft)
Loại 8 cánh: Là loại máy có công suất lớn có khả năng nâng hạ được vật nặng từ 15kg trở lại, khung sườn của nó cũng không quá lớn, gồm 8 cánh , 8 động cơ, việc nâng hạ vật nặng phụ thuộc vào công suất motor mà mình sử dụng.
Công dụng : nó tích hợp được tất cả các tính năng của 2 loại máy bay nói trên, nhưng vì khổ lớn nên không tiện đem đi xa như đi du lịch, dã ngoại.
Nó cũng có thể quan sát cánh đồng khi tích hợp camera giúp người sử dụng có thể quan sát được mọi việc trên mảnh đất của mình mà không cần phải đi lại vất vả.
Khi cần thiết có thể tham gia cứu hộ cứu nạn.
Loại 8 cánh tận dụng việc nâng hạ được vật nặng nên được ưu tiên chọn áp dụng vào nông nghiệp, thay thế sức người trong việc bảo vệ cây trồng.
Hình 2. 3 Máy bay 8 cánh (8 wing aircraft)
2.2.3 Tính năng của thiết bị bay:
Thiết bị bay được sản xuất phục vụ cho nhiều công việc, điều kiện và kinh tế khác nhau. Mỗi sản phẩm đều có đặc điểm chất lượng thích hợp với mục đích công việc khác nhau.
Các loại thiết bị bay không chênh lệch nhau nhiều về tính năng chỉ nhau ở công suất động cơ và khung sườn để chịu tải. Trong các loại thiết bị bay như 4 cánh, 6 cánh, 8 cánh mọi người đều có được những lựa chọn khác nhau. Nếu muốn công suất lớn thì có thể thay động cơ, bay cao xa thì điều chỉnh về tính hiệu thu phát, ngoại hình của thiết bị bay thì thay đổi kiểu cánh kiểu khung sườn.
Sự lựa chọn phù hợp nhất là nên chọn thiết bị bay theo mục đích của công việc thì tuổi thọ và sưc bền của nó sẽ lâu hơn. Không nên bắt thiết bị bay làm việc vượt khả năng của nó: Như loại 4 cánh dùng để tải vật nặng thiết bị cũng hoạt động được nhưng sẽ hư trong quá trình bay hoặc giảm tuổi thọ.
2.2.4 Chất lượng của thiết bị bay:
Hiện nay thiết bị bay trên thị trường khá phổ biến nhưng thiết bị bay phục vụ cho công tác cứu hộ thì chưa thịnh hành các loại thiết bị bay khác thì giá thành rất cao, nếu đưa vào công tác cứu hộ thì sẽ tốn nhiều chi phí cho ngành nghề cứu hộ.Mạng sống của con người là không có gì so sánh được cho nên chúng ta phải phát triển ngành cứu hộ hiện đại hơn để có thể giúp ích cho người gặp nạn.
2.2.5 Chọn lựa thiết bị bay phù hợp với công tác cứu hộ
Đây là câu hỏi đầu tiên cho những người mua thiết bị bay nói riêng và tất cả các sản phẩm khác nói chung hay hỏi nhất. Không biết là chọn giường y tế giường bệnh như thế nào?
Tất cả các sản phẩm bay nếu vận hành được đều có thể phục vụ trong cứu hộ. Nếu mục đích phục vụ với tải trọng khác nhau thì nên lựa chọn theo động cơ vì với mỗi loại động cơ khác nhau có thể nâng được tải trọng khác nhau.
2.2.6 Đặc điểm của thiết bị bay
Là loại máy chưa có trên thị trường Việt Nam ,trên thị trường ngoài nước giá thành cao và chưa áp dụng được vào trong cứu hộ nhiều
Điều khiển bằng mạch Nasa và năng lượng sinh ra do pin 6S
Bán động hóa.
2.3 Đối tượng và phương pháp nghiên cứu
2.3.1 Đối tượng nghiên cứu:
Một số mô hình, các sản phẩm, các thiết bị hỗ trợ trong cứu hộ, các vật liệu dự kiến dùng để chế tạo thiết bị.
2.3.2 Phương pháp nghiên cứu và các bước tiến hành:
Nghiên cứu cơ cấu, linh kiện, phụ tùng.
- Thiết kế sơ đồ tổng thể trên máy vi tính.
- Lựa chọn, mua sắm vật liệu.
- Chế tạo theo sơ đồ thiết kế.
- Thử nghiệm và đánh giá kết quả
- Hoàn thiện mô hình và chế tạo sản phẩm
- Áp dụng vào thực tiễn thao tác trên cánh đồng.
- Các tiêu chí của sản phẩm: Trong quá trình nghiên cứu, phân tích, chúng tôi thấy rằng, để sản phẩm sự định chế tạo thực sự có giá trị sử dụng phục vụ trong cứu hộ thay thế sức lao động cho người cứu hộ.
Chương 3 CƠ SỞ LÝ THUYẾT
3.1 Lý thuyết chuyên ngành
-Vận dụng kiến thức chuyên ngành Cơ Khí Chế Tạo Máy để tính toán thiết kế máy. Bao gồm các loại sách như: Thiết kế máy, Tính toán hệ dẫn động cơ khí, Dung sai kỹ thuật đo, Công Nghệ chế tạo máy… (đã được trình bày ở phần tài liệu tham khảo).
-Ngoài ra còn sử dụng các công thức thuộc dung sai để tính dung sai cho bản vẽ, các công thức sức bền để tính bền cho các chi tiết máy.
3.2 Lý thuyết bên ngoài thực tiễn
Vận dụng cơ sở lý thuyết về kinh tế, nghiên cứu thị trường trong và ngoài nước về thiết bị bay phục vụ cho công tác cứu hộ.
Tính toán giá thành sản xuất và hoạch định được chi phí chế tạo.
3.3 Một số công thức tham khảo liên quan để tính:
- Áp suất động
Qw=0.5*Pw*V^2
- Hệ số áp suất :
Cp=(P-Pw)/Qw
- Hệ số lực nâng:
Cl=L/(Qw*S)
- Hệ số lực cản :
Cd=D/(Qw*S)
- Hệ số lực nâng vuông gốc :
Cn=N/(Qw*s)
- Hệ số lực cản vuông gốc :
Ca=A/(Qw*S)
- Hệ số mô men :
Cm=M/(Qw*S)
- Mô men xoắn trục động cơ :
T=P*9.55
- Công suất sử dụng pin :
P0=U*Itb
- Tổng công suất mà pin phải cung cấp :
P=U*Itb
- Hiệ suất sử dụng pin :
H%=100*P0/P
- Công suất thất thoát nhiệt của pin :
Pttn=P-P0
- Tải trọng cánh :
T=P/Sc
- Số vòng tua của động cơ :
N=H*U
- Tính lực nâng :
Mg=mv
- Công suất :
P=m*V^2/2
Chương 4 CƠ CẤU VÀ CHỨC NĂNG CÁC BỘ PHẬN
4.1 Cơ cấu của thiết bị bay
Bao gồm: Động cơ, cánh quạt, mạch điều khiển,điều tốc, khung sườn....
Là cơ cấu rất quan trọng quyết định đến chất lượng của toàn bộ thiết bị bay.
Cơ cấu nâng hạ của thiết bị bay: có nhiều cơ cấu nâng hạ thiết bị tùy vào tải trọng mà ta có thể chọn và sử dụng motor có cơ cấu phù hợp.
Motor Emax 600KV_MT4008
Max thrust:1200g
Weight:96g
Diameter: 46mm
No.of cells:3-45
Speed:4750(RPM)
Propeller:11”-15”
Motor Emax 600KV_MT3510
Max thrust:1780g
Weight:102g
Diameter: 41.5mm
No.of cells:3-4
Speed:6100(RPM)
Propeller:14”-15”
Motor Emax 380KV_MT4008
Max thrust:1460g
Weight:93g
Diameter: 41.5mm
No.of cells:3-4s
Speed:6070(RPM)
Propeller:12”-15”
Cánh quạt gồm:
Cánh cacbon 6030 Propeller Muticopter (2pcs/set) 11”- 15”
Cánh cacbon TAROT 1255 Propeller Muticopter (2pcs/set) 11”- 15”
Cánh cacbon TAROT 1755 Propeller Muticopter (2pcs/set) 11”- 15”
Cánh cacbon TAROT 1655 Propeller Muticopter (2pcs/set) 11”- 15”
Cánh cacbon TAROT 1355 Propeller Muticopter (2pcs/set) 11”- 15”
Cánh cacbon TAROT 1155 Propeller Muticopter (2pcs/set) 11”- 15”
Điều tốc:
ESC Emax Simon 12A
ESC Emax Simon 20A
ESC Emax Simon 30A
ESC Emax Simon 40A
ESC Emax Simon 60A
Pin:
TATTU 5500mmAh 3s 25c Lipo Battery
TATTU 5500mmAh 4s 25c Lipo Battery
Lipo Battery Gens Ace 22.2v 1800mmAh_45C 6s1p
Lipo Battery Gens Ace 11.1v 1800mmAh_45C
Lipo Battery Gens Ace 11.1v 10000mmAh_45C
Kết luận: Chọn động cơ Motor Emax 600KV_MT4008
Cánh cacbon TAROT 1155 Propeller Muticopter (2pcs/set) 11”- 15”
ESC Emax Simon 30A
Lipo Battery Gens Ace 11.1v 10000mmAh_45C
Phù hợp với động cơ và khung sườn đã chọn.
4.2 Chức năng và vật liệu để làm nên nó.
4.2.1 Tay điều khiển tự động, (còn được gọi là TX)
Hình 3. 1 Tay điều khiển
- Chức năng: phát tính hiệu cho bộ phận thu trên flycam nhận rồi truyền tính hiệu nhân để điều chỉnh đươc flycam , điều khiển flycam bay theo mạch đã được set up, có nhiều loại tay điều khiển khác nhau mõi máy bay điều có môt tây điều khiển riêng của nó không sử dụng chung với nhau đươc, muốn mua đúng tay điều khiển để sử dụng tốt thì phải coi thông số của motor với con nhận tính hiệu trên flycam mới sử dụng đươc tốt cho nó, nếu mua bộ tay điều khiền không phù hộp hay mua loại kém chất lượng thì nó sẽ gây ra nhiều rỉu ro đến người điều khiển với người sung quanh, nếu tay điều khiển không phù hôp nó sẽ gây ra trể tính hiệu phát của tay điều khiển phát cho tính hiệu nhận trên flycam, còn sử dụng tay điều khiển đúng của nó thì nó rất nhạy tính hiệu của nó được phát đi va thu lại trong vòng 1 giây. nói chung phải lựa chọn cho hộp lý nhất
Ví Dụ : Máy by đang hạ xuống mà giờ mình muốn cho nó bay cao lên nhưng trên tay điều khiển nó bị trề từ 5-10 giây nó có thể rớt máy bay xuống đất luôn tại vì nó đang hạ xuống nhưng tính hiệu mình phát lên tính hiệu thu nó bị trể hất 5-10 giây , thì sao 5-10 giây nó mới nhận đươc tính hiệu là bay trở lên.
Trong tay điêu khiển có những chứ năng sao đây :
+ Cần gạt bên tay trái có chức năng điều chỉnh ga lên xuống bay cao hay bay thấp.
+ Cần gạt bên tay phải có chức năng điều khiển cho flycam qua trái hay qua phải , đi tới hay đi lui, xoay đươc flycam 360 độ
+ Trên đầu là anten có chức năng để phát tính hiêụ lên mạch điều khiền của flycam.
+ Nút gật lên gật xuống ở trung tâm cùa tây điều khiền có chức năng On hoặc OFF của tây điều khiển
+ Màng hình của tây điều khiển có chức năng cho ta biết đươc chế độ bay đươc bao nhiêu xa , độ cao bay đươc bao nhiêu met, trên tay điều khiền có nhiều kênh, nó giúp phát các kênh lên flycam hay lên sevol
+ Còn những nút bấm còn lại hay cần gạt là do mình set kênh vào nó thoy, mình muốn điều khiển thêm hay gắng những động cơ khác trên flycam thi mình mới set thêm kênh vao, còn bình thường thi như vậy là đủ để flycam bay được rồi , trên tay điều khiển nó có đươc 13 kênh .
Vật liệu :
+ Vỏ của tay điều khiền được làm bằng mủ cứng .
+ Màng hình thì được làm cường lực.
+ Những nút gạt trên tay điều khiển thì được làm băng inox.
+ Còn bộ phân bên trong dduocj làm bằng đồng và nhôm.
4.2.2 Động cơ quay.
Hình 4. 1 Động cơ motor
- Chức năng: tạo ra tốc độ quay cho flycam.
+ quay cùng kim đồng hồ
+ quay ngược kim đông hồ
Vật liệu:
+ Vỏ ngoài của động cơ được làm bằng nhôm
+ Trong động cơ đươc quấn là giây đông nguyên chất
+ Trục của đông cơ đươc làm bằng hỗn hộp Graphit, hổn hộp graphit nay rất đươc ưa chuộng trong lĩnh vưc cơ khí nó làm đươc nhiều cái mà các chất khác không lam được giống như để chế tạo ra trục quay của động cơ máy lạnh củng được làm bằng vật liệu graphit nó được sử dụng rất rộng rai nó có đặc tinh là nhẹ , độ bên nó rất là cao , chiệu nhiệt độ đươc tốt , gặp nhiệt độ cao nó không bi biến thể co ra hay rút vào, đói với không khí nó cung không hề bị ooxy hóa , với giá thành đẻ sản suất ra nó cung tương đói rẻ so với các chất khác vì vậy trục động cơ thường được làm bằng hổn hộp graphit.
Ví Dụ: Như điển hình cái máy điều hòa thì nó hoạt động liên tục bao nhiêu năm không hề bị hư hao gì đói với trục động cơ của máy . nói chung là xài được liên tục không hư hao gì.
4.2.3 Thân flycam
- Chức năng:
+ Thân ly cam nó rất quan trọng nó là trọng tâm của máy bay
+ Nó giúp các chi tiết trong máy bay gắn kết lại với nhau
+ Nó tạo ra hình thể cho con flycam , thân máy bay phải kiên cố chắc chắn thì mới có thể nâng trọng lượng của toàn máy bay lên được , không phải nâng lên đươc là xong mà còn phải bay lên cao ma chịu được nhiệt độ của động cơ gay ra với nhiệt độ của mặt trời, còn bị ảnh hưởng do áp suất của dó gây ra , càng bay lên cao thì áp suất của gió càng lớn do vậy nên thân máy bay cần phải kiên cố và chác chắn.
- Vật liệu:
Có nhiều loại vật liệu để làm nên khung sường ( thân máy bay ) :
+ Gỗ cung làm nên thân máy bay đươc tại vì chất liệu kết cấu trong gỗ nhẹ chắc chắn nhưng chịu lực thì hơi kém do nhưng giá thành thì tuong đối là rẻ hơn so với các vật liệu khác nhưng loại này thì thường sử dụng nhưng máy bay tương đối nhỏ khoảng chừng 0.4 m vuông đổ lại vì chịu lực của nó yếu nên lực nâng của nó củng như vây nếu bay không an toàn đối với người sung quanh nơi minh cần bay.
+ Nhôm : Được sử dung rất rộng rãi hầu như tất cả các máy bay lớn mà trong nước lẩn ngoài nước đều sử dụng loại nay, vì nó nhẹ mà kết cấu trong nhôm cũng thuộc dạng tốt bền trong các chất , khi bay lên cao thì nó chiệu đươc nhiệt độ tăng lên hay giảm xuống của khí hậu và chiệu được nhiệt độ của động cơ gây nên , chiệu được áp suất gió rất là lớn , nó có thể bay cao đươc hơn 10000 m so với mực ước biển là bình thường, giá thành về vật liệu nhôm cung không quá mắc so với các vật liệu khác như đồng kẽm,…, nên nhôm đươc sử sụng rất rộng rãi trong nghành hàng không của Việt Nam và trên toàn thế giới.
+ Ống các bon na no : Chất này đươc sử dụng rất rộng nó củng không thua kém gì so với nhôm hay các chất khác, . và kích thước của ống, nhẹ hơn thép 6 lần nhưng lại bền hơn cỡ 100 lần, chịu nhiệt độ cao rất tốt (~ 2800oC trong chân không và ~ 700oC trong không khí), Các ống nano các bon có diện tích bề mặt lớn (250 m2/g), có khả năng phát xạ điện tử ở điện trường thấp (V/μm) ứng với mật độ dòng phát xạ lớn (μA/cm2). Ngoài ra chúng cũng được dùng làm nguồn phát xạ điện tử cho màn hình phẳng, các đầu dò nano như mũi nhọn ở hiển vi quét đầu dò (SPM), các loại vật liệu nano composite siêu bền, các bộ tích trữ năng lượng cao hay các cảm biến kích thước bé, nó cung không quá mắc , nên chùng em đả chọn vật liệu ày dể làm ra thân máy bay.
4.2.4 Mạch điều khiển.
Hình 4. 3 Mạch chính nhìn từ bên trái qua
Hình 4. 4 Mạch chính nhìn từ bên phải qua
- Chức năng: là trái tim của nguyên con flycam quản lý hoạt động cho từng bộ phận trên flycam , nó rất la quan trọng đối với flycam, nó có tần số là 400hz .
+ Như hình bên trái cho thấy được mạch điều khiển nó có nhiều chân , những chân đó cho mình cấm rắc đê liên kết các mạch điện lại với nhau như các chân :
EXP : để nối với tinh hiệu nguồn pin cung cấp vào mạch điện
LED và USB : hai cổng này là một chân cắm
A : để điều chỉnh tính hiệu trái hay phải cho flycam
E : để điều chỉnh phía trước phía sau cho flycam
T : điều chỉnh ga tăng hay giảm cho flycam
R : kiểm soát bánh láy cho flycam
U : đối với vận tốc điều khiển cho flycam
X1,X2,X3 : điều chỉnh các cổng phụ cho flycam
Hướng chỉ mũi tên ở trung tâm bộ điều khiển cho tha biết đó là hướng để chỉ hướng của đầu của flycam.
+ Còn hình bên phải của bộ mạch điều khiển cung là các chân để nối các rắc cấm lại với nhau
M1 :để nối vào chân của điều tốc với động cơ 1
M2 :để nối vào chân của điều tốc với động cơ 2
M3 :để nối vào chân của điều tốc với động cơ 3
M4 :để nối vào chân của điều tốc với động cơ 4
M5 :để nối vào chân của điều tốc với động cơ 5
M6 :để nối vào chân của điều tốc với động cơ 6
F1 :để nối vào chân của điều tốc với động cơ 7 hay còn để đấu vào các động cơ khác trên flycam hay các bộ phân khác trên lycam
F2 :để nối vào chân của điều tốc với động cơ 8 hay còn để đấu vào các động cơ khác trên flycam hay các bộ phân khác trên lycam
Vật liệu :
+ Phần vỏ ở ngoài của bộ mạch điều khiển được làm bằng nhựa cứng
+ Phần chân để nối các các mạch điện lại với nhau được làm bằng đông nguyên chất
+ Phần mạch điện nằm bên trong được làm bằng nhôm và đồng.
4.2.5 Cánh quạt.
- Chức năng: dùng để đẩy gió giúp flycam bay lên.
- Vật liệu :
+ Nhựa : là một loại vật liệu nhẹ dẻo chiệu lực cung tương đối là tốt , an toàn giá thành tương đối là rẽ so với các chất khác, nhưng được sử dụng chủ yêú với các máy bay dạng đồ chơi nhỏ và gọn chứ không sử dụng cho các máy bay lớn hay flycam được tại nó không đủ chất lượng khi mình bay trên cao…
+ Nhôm : Được sử dung rất rộng rãi hầu như tất cả các máy bay lớn nhỏ mà trong nước lẩn ngoài nước đều sử dụng loại nay, vì nó nhẹ mà kết cấu trong nhôm cũng thuộc dạng tốt bền trong các chất , khi bay lên cao thì nó chiệu đươc nhiệt độ tăng lên hay giảm xuống của khí hậu và chiệu được nhiệt độ của động cơ gây nên , chiệu được áp suất gió rất là lớn , nó có thể bay cao đươc hơn 10000 m so với mực ước biển là bình thường, giá thành về vật liệu nhôm cung không quá mắc so với các vật liệu khác như đồng kẽm,…, nên nhôm đươc sử sụng rất rộng rãi trong nghành hàng không của Việt Nam và trên toàn thế giới.
+ các bon na no : Chất này đươc sử dụng rất rộng nó củng không thua kém gì so với nhôm hay các chất khác, . và kích thước nhẹ hơn thép 6 lần nhưng lại bền hơn cỡ 100 lần, chịu nhiệt độ cao rất tốt (~ 2800oC trong chân không và ~ 700oC trong không khí), Các ống nano các bon có diện tích bề mặt lớn (250 m2/g), có khả năng phát xạ điện tử ở điện trường thấp (V/μm) ứng với mật độ dòng phát xạ lớn (μA/cm2). Ngoài ra chúng cũng được dùng làm nguồn phát xạ điện tử cho màn hình phẳng, các đầu dò nano như mũi nhọn ở hiển vi quét đầu dò (SPM), các loại vật liệu nano composite siêu bền, các bộ tích trữ năng lượng cao hay các cảm biến kích thước bé, nó cung không quá mắc , nên chúng em đả chọn vật liệu ày dể làm ra cánh máy bay.
4.2.6 Bộ phận giữ và cho rơi áo phao :
- Chức năng:
+ Giữ áo phao chặt vào flycam khi bay lên cao và không bị rơi.
+ Còn bộ phận rơi thì khi tới mục tiu cần rơi thì cho rơi xuống
- Vật liệu :
+ Nhựa : ống nhựa có độ dẻo tốt nhưng chiu lực hơi yếu tùy thuộc vào mục đích mà mình cần sử dụng là gì, giá thành tuong đối là rẽ so với các vật liệu khác vì vậy ở đây chúng em chọn nhựa
+ Nhôm : Được sử dung rất rộng rãi hầu như tất cả các máy bay lớn nhỏ mà trong nước lẩn ngoài nước đều sử dụng loại nay, vì nó nhẹ mà kết cấu trong nhôm cũng thuộc
dạng tốt bền trong các chất , khi bay lên cao thì nó chiệu đươc nhiệt độ tăng lên hay giảm xuống của khí hậu và chiệu được nhiệt độ của động cơ gây nên , chiệu được áp suất gió rất là lớn , nó có thể bay cao đươc hơn 10000 m so với mực ước biển là bình thường, giá thành về vật liệu nhôm cung không quá mắc so với các vật liệu khác như đồng kẽm,…, nên nhôm đươc sử sụng rất rộng rãi trong nghành hàng không của Việt Nam và trên toàn thế giới.
4.2.7 Chân đỡ.
- Chức năng: dùng để đỡ phần thân của flycam và giửa cân bằng cho flycam lúc cất cánh giúp flycam đứng vững khi hạ xuống.
- Vật liệu :
+ Ống các bon na no : Chất này đươc sử dụng rất rộng nó củng không thua kém gì so với nhôm hay các chất khác, . và kích thước của ống, nhẹ hơn thép 6 lần nhưng lại bền hơn cỡ 100 lần, chịu nhiệt độ cao rất tốt (~ 2800oC trong chân không và ~ 700oC trong không khí), Các ống nano các bon có diện tích bề mặt lớn (250 m2/g), có khả năng phát xạ điện tử ở điện trường thấp (V/μm) ứng với mật độ dòng phát xạ lớn (μA/cm2). Ngoài ra chúng cũng được dùng làm nguồn phát xạ điện tử cho màn hình phẳng, các đầu dò nano như mũi nhọn ở hiển vi quét đầu dò (SPM), các loại vật liệu nano composite siêu bền, các bộ tích trữ năng lượng cao hay các cảm biến kích thước bé, nó cung không quá mắc , nên chngs em đả chọn vật liệu ày dể làm ra chân đỡ flycam.
4.2.8 Bộ điều tốc (còn được gọi tắc là ESC).
Hình 4. 5 Điều chỉnh tốc độ
- Chức năng: dùng để điều chỉnh tốc độ cho động cơ quay,nó có thể điều chỉnh được số vòng quay của đông cơ điều chỉnh vận tốc nhanh hay chậm đẻ phù hộp với áp suất và lực gió gây nên cho động cơ, trong con điều tốc nó có một bộ sử lý tốc độ giống như một thuật toán ddeerr tính được số vòng quay bao nhiêu là phù hộp khi bay nó đều nhận tính hiệu từ bộ mạch chính của bộ điều khiển
Ví Dụ :
Có một cái bống đèn công suất là 50w muốn cho bống đèn này sáng 100% thì mình phải cấp dòng điện I= 0.2A , I=P/U trong đó P=50 w, còn U= 220v
Muốn bống đèn sáng 50% công suất thi mình cấp vào dòng điện I=0.1 A, có hiệu điện thê U= 110v , nhưng đối với con điều tốc thí nó thây đổi số vòng quay liên tục chư không phải như mình cấp dong điện cho nó quay, tại trong nó đả tính toán sẳn hết rồi nó chỉ nhận tính hiệu từ mạch chính của bộ điều khiển xong nó mới truyền ra cho motor quay.
Trong con điều tốc nó có hai đầu dây ra một đầu cho ra motor còn đầu còn lại cho vào nguồn pin và cho vào mạch điều khiển chính
+ Đầu bên trái có ba dây ra trong đó có hai dây âm dương được nối vào nguồn pin để cung cấp nguồn năng lượng pin vào cho motor quay, còn dây còn lại thì đấu vào chân M1 của điều tốc 1, điều tốc nào thì đấu vào chân M đó
+ Đầu bên phải có ba dây ra ba dây đó được nối với động cơ motor ba pha
Vật liệu :
+ Bên ngoài được cấu tạo bởi nhựa dẻo
+ Còn bên trong thì có một miến BK để nối các mạch ở trong lại với nhau
+ Phần bên trong nưa là đồng
4.2.9 Bộ điều khiển nguồn điện vào flycam (còn gọi tắc la PMU ).
Hình 4. 6 Bộ điều khiển xử lý nguồn điện
Chức năng : PMU nó có nhiều cổng mỗi cổng vào đều có một chức năng khác nhau nhưng chức năng chính của nó là cung cấp nguồn điện vào toàn mạch
+ thứ nhất là : cổng nguồn pin vào có thông số pin là 2s-6s pin LiPo và dòng điện của bin la
Pin 2s có dong điện 7.4 v
Pin 3s có dòng điện 11.1 v
Pin 4 có dòng điện 14.8 v
Pin 5s có dòng điện 18.5 v
Pin 6s có dong điện 22.2 v
+ thứ hai : cổng kết nối với định vị GPS
+ thư ba : cổng can để mở rộng
+ thứ tư : kết nối với bộ điều khiển chính
+ thứ năm :
Quang trọng sản lượng pin liên tục của PMU la 3A-5V và dòng điện tức thời tối đa là 7.5A nếu PMU không có khả năng làm việc chung với sevol thì nên sử dụng một nguồn điện riêng biệt cho sevol nếu quá tải nó có thể gay ra bảo vệ cho PMU và dẩn đến nó sẻ khởi động lại toàn bộ điều khiển chính trong khi đang điều khiển ma nó khởi động lại như vậy thì bị mất tính hiệu làm cho máy bay bi rơi tự do.
4.2.10 Định vị GPS
Hình 4. 7 Định vị GPS
Chức năng: nó có thể liên kết được với điện thoại hay máy tính để biết đối tượng cần làm việc là ở đâu và nó sẻ đến chính xác chổ nó cần làm nhiệm vụ , nếu bị mất liên lạc nó sẽ có khả năng tự tìm được đường về nhờ tính hiệu mà nó đả lưu lại ở chổ xuất phát
Mủi tên trên hình đang chỉ hướng của đầu máy bay
4.2.11 Cổng USB đưa phần mêm vao trong flycam
Hình 4. 8 Đèn LED và cổng USB
Chức năng : nó có hai chức năng chính là cổng USB để đưa phần mêm vào tròng, và đèn LED để chúng ta biết mà điều khiển flycam
+ Thứ nhất : cổng USB để kết nối với máy tính đưa phân mềm vao trong flycam để điều chỉnh các tính hiệu như là bán kính máy bay bay được bao nhiệu xa là mất tính hiệu hay kết nối với điều tốc số vồng quay trung binh nhất là bao nhiêu để bình ổn được vận tốc bay
+ Thứ hai : Đèn LED báo hiệu cho chúng ta biết khi đang điều khiển ở duois đất mà nhình lên trên không
Khởi động thì đèn led nhấp nhấy phát ra màu đỏ - xanh
Khi xuất phát bay đèn led nhấp nhấy chuyển về màu xanh là bay được
Khi gần hết pin đèn lednhấp nhấy chuyển về màu đỏ lúc đó chúng ta điều khiển cho máy bay từ từ hạ cánh xuống cho an toan
Khi máy bay mất tính hiệu với bộ điều khiển tay thí nhấp nhấy màu vàng
Khi GPS mất hoạt động thí đèn led nhấp nhấy đỏ vàng
4.2.12 Bộ thu tính hiệu trên flycam (còn gọi tắc là RX) .
Hình 4. 9 Mạch chính từ bên trái qua
hình 4. 10 Bộ thu tín hiệu
Chức năng : để nhận tính hiệu của tây điều khiển truyền lên rồi truyền tính hiệu đó vào các mạch điều khiển để điều khiển được flycam
Từ bộ thu tính hiệu nối các chân với các chân của mạch điều khiển chính
+ sơ đồ nối dây :
+ AILE : điều khiển tính hiệu trái hay phải
+ ELEV : điều khiển tính hiệu lên hay xuống
+ THRO : điều khiển ga tăng giảm
+ RUDD: điều khiển bánh láy
+ 3-position switch : điều khiển các tính hiệu khác
Trên bộ thu RX có anten thu khi anten có gốc 90 độ đó là gốc thu tính hiệu tốt nhất.
...............
Chương 1 THỬ NGHIỆM MÔ HÌNH BAY
1.1 Thử nghiệm và khả năng bay của mô hình
Do thiết kế chưa được chính xác nên khi bay từ mặt đất lên trên thì no không được câng bằng cho lắm ( thực tế là cái mũi lên trước cái đích lên sau ) nhưng chúng em đã khác phục được tình trạng đó
Bay được đúng với thực tế khi tính toán chọn động cơ và các thiết bị khác
Cơ cấu nâng hạ thì hoạt động rất là tốt đúng với yêu cầu chúng em đề ra
1.2 Đánh giá
nhìn chung mô hình cũng khá phù hộp , làm việc tương đối ổn định có khã năng bay trong thời gian lâu được
Kinh phí chế tạo cũng không quá cao.
tuy nhiên còn một số hạn chế khi điều khiển bay thì không được tăng ga hết công suất 100% liên tục sẽ gây nguy hiểm đến motor vì công suất lớn làm việc liên tục có khã năng gây cháy motor.
Chương 2 TÍNH GIÁ THÀNH
2.1 Giá thành của máy được tính theo bảng sau :
|
STT |
tên chi tiết |
Số lượng |
Giá (ngàn/c) |
Giá ( ngàn) |
|
1 |
động cơ motor |
6 |
250 |
1500 |
|
2 |
ống car bon đk 16cm |
8 |
30 |
240 |
|
3 |
Tấm khung |
2 |
150 |
300 |
|
4 |
cánh |
6 |
75 |
450 |
|
5 |
Diều tốc |
6 |
200 |
1200 |
|
6 |
Dế đỡ motor |
6 |
80 |
480 |
|
7 |
Bulong M4 |
100 |
1 |
100 |
|
8 |
Bulong M2 |
12 |
1 |
12 |
|
9 |
Dai ốc M4 |
8 |
1 |
8 |
|
10 |
Dế chiệu nhệt |
6 |
25 |
150 |
|
11 |
Khốp chiệu lực |
16 |
25 |
340 |
|
12 |
Dây điện |
|
200 |
200 |
|
13 |
Bát bắt chân |
4 |
25 |
100 |
|
14 |
Dây rút |
1 |
30 |
30 |
|
15 |
keo |
1 |
20 |
20 |
|
16 |
ống nối T đk 16cm |
6 |
5 |
30 |
|
17 |
Dệm cao su |
4 |
5 |
20 |
|
18 |
Dịnh vị GPS |
1 |
400 |
400 |
|
19 |
Bộ thu |
1 |
400 |
400 |
|
20 |
Bộ điều khiển chính |
1 |
2000 |
2000 |
|
21 |
Bộ điều khiển nguồn điện |
1 |
300 |
300 |
|
22 |
Pin 6s |
1 |
1500 |
1500 |
|
23 |
Servo |
1 |
100 |
100 |
|
24 |
Khung nâng |
1 |
150 |
150 |
|
25 |
Các thanh nâng |
3 |
10 |
30 |
|
26 |
Tay điều khiển |
1 |
1500 |
1500 |
|
|
Tổng |
10938 |
||
Hình 5. 5 Bảng giá thành vật liệu
2.2 KẾT LUẬN – ĐỀ NGHỊ
2.2.1 Thông qua quá trình làm đồ án, chúng em đã đạt được những kết quả sau
- Hoàn thành thuyết minh tính toán và chế tạo được mô hình kiểm nghiệm thành công bộ phận nâng hạ và bay được .
- Trích luỹ được nhưng kinh nghiệm quý báo trong quá trình làm.
- Khả năng tính toán và hoạch định được kinh phí làm đồ án.
- Vì đây là loại chưa có trên thị trường Việt Nam nên có thể đây là tiền đề
cho chúng em phát triển sản phẩm sau này.
2.2.2 Kiến nghị
- Quá trình làm đồ án chúng em thật sự gặp rất nhiều khó khăn trong việc chế
tạo cũng như địa điểm để làm đồ án. Vì thế chúng em kính mong Khoa mình sẽ
có nhiều hơn nữa sự giúp đỡ cho sinh viên làm đồ án. Đặc biệt là tạo điều kiện
máy móc, cơ sở vật chất cho quá trình làm đồ án.