ĐỒ ÁN TỐT NGHIỆP TÍNH TOÁN THIẾT KẾ HỆ THỐNG TREO TRÊN XE HYUNDAI CRETA 2016 ÐH CN GTVT
Lời nói đầu
Trong nền kinh tế đang tăng trưởng mạnh mẽ của nước ta, nhu cầu về giao thông vận tải ngày càng lớn. Vai trò quan trọng của ôtô ngày càng được khẳng định vì ôtô có khả năng cơ động cao, vận chuyển được người và hàng hoá trên nhiều loại địa hình khác nhau. Những năm gần đây, lượng xe du lịch có xu hướng tăng lên đặc biệt là loại xe HYUNDAI CRETA với ưu điểm về khả năng cơ động tính kinh tế và thích hợp với nhiều mục đích sử dụng khác nhau.Với ôtô nói chung và xe HYUNDAI CRETA nói riêng an toàn, êm dịu chuyển động là chỉ tiêu hàng đầu trong việc đánh giá chất lượng khai thác và sử dụng của phương tiện. Một trong các hệ thống quyết định đến tính an toàn, êm dịu và ổn định chuyển động là sự kết hợp hoàn hảo của hệ thống lái và hệ thống treo đặc biệt là ở tốc độ cao. Chính vì vậy em rất muốn tìm hiểu sâu hơn nữa về hai hệ thống này và cũng rất mày cho em vì các thầy giáo trong bộ môn cơ khí ôtô đã đồng ý cho em được nhận đồ án tốt nghiệp của mình là. Tính toán thiết kế hệ thống treo trên xe HYUNDAI CRETA. Sau hơn ba tháng làm việc nghiêm túc cùng với sự hướng dẫn tận tình của thầy giáo Đỗ Thành Phươngcùng các thầy giáo trong bộ môn cơ khí và của các bạn sinh viên cùng lớp, em đã cơ bản hoàn thành đồ án tốt nghiệp của mình. Trong quá trình thực hiện, chắc chắn em không tránh khỏi những thiếu sót. Do đó em rất mong nhận được sự chỉ bảo và góp ý của các thầy và các bạn.
Em xin chân thành cảm ơn !
CHƯƠNG 1. 4
TỔNG QUAN HỆ THỐNG TREO.. 4
1.1. Công dụng, yêu cầu của hệ thống treo. 4
1.1.1. Công dụng. 4
1.2. Các bộ phận chính của hệ thống treo. 5
1.3. Các thông số tương đương và mô phỏng hoạt động. 9
CHƯƠNG 2. 10
2.1. Hệ thống treo phụ thuộc. 10
2.2. Hệ thống treo độc lập. 13
2.2.1. Dạng treo 2 đòn ngang. 14
2.2.2. Dạng treo Mc.Pherson. 15
CHƯƠNG 3. 24
TÍNH TOÁN THIẾT KẾ HỆ THỐNG TREO XE HYUNDAI CRETA.. 24
3.1. Xác định các thông số cơ bản của hệ thống treo. 24
3.1.1. Các thông số ban đầu. 24
Số liệu cơ sở để tính toán. 28
3.2. Động học hệ treo mc.pherson. 28
3.2. 1 Xác định độ dài càng chữ A và vị trí các khớp (phương pháp đồ thị)28
3.2.2. Đồ thị động học để kiểm tra động học hệ treo. 33
3.2.3. Mối quan hệ hình học của hệ treo Mc.Pherson. 34
3.2.4. Đồ thị động học hệ treo Mc.Pherson. 36
3.3. Động lực học hệ treo Mc.Pherson. 37
3.3.1. Các chế độ tải trọng tính toán. 37
3.3.2. Xác định độ cứng và chuyển vị của phần tử đàn hồi38
3.3.3. Xác định các phản lực và lực tác dụng lên hệ treo cầu trước dẫn hướng:40
3.4. Chọn và kiểm bền các bộ phận chính. 45
3.4.1. Đòn ngang chữ A.. 45
3.4.2. Tính bền Rôtuyn. 50
3.5. Tính toán lò xo. 52
3.5.1. Lực lớn nhất tác dụng lên lò xo. 52
3.5.2. Trình tự thiết kế lò xo. 53
3.5.3. Kết luận. 56
3.6. Tính thanh ổn định. 56
3.7. Tính tóan giảm chấn. 62
3.7.1. Chọn giảm chấn. 62
3.7.3. Tính bền ty đẩy piston của giảm chấn. 72
CHƯƠNG 4. 74
QUY TRÌNH CÔNG NGHỆ CHẾ TẠO RÔ TUYN.. 74
4. 1. Phân tích chi tiết gia công. 74
4.1.1. Kết cấu rôtuyn. 74
4.1.2. Phân tích điều kiện làm việc và yêu cầu kỹ thuật của Rô-tuyn. 74
4.1.3. Lập quy trình công nghệ gia công khớp cầu. 75
4.1.4. Chọn phôi75
4.2. Lập sơ đồ nguyên công. 75
4.2.1. Nguyên công 1: Tiện mặt đầu, khoan lỗ tâm và tiện đứt phôi75
4.2.2. Nguyên công 2: Khoan lỗ tâm, tiện mặt đầu mặt còn lại, tiện thô. 76
4.2.3. Nguyên công 3: Tiện các bề mặt, tiện côn và tiện ren M16 77
4.2.4. Nguyên công 4: Tiện cầu R15. 78
4.2.5. Nguyên công 5: Khoan lỗ f 4. 79
4.2.6. Nguyên công 6: Nhiệt luyện. 80
4.2.7. Nguyên công 7: Mài81
4.2.8. Nguyên công 8: Kiểm tra. 82
KẾT LUẬN.. 83
TÀI LIỆU THAM KHẢO.. 83
CHƯƠNG 1
TỔNG QUAN HỆ THỐNG TREO
1.1.Công dụng, yêu cầu của hệ thống treo
1.1.1. Công dụng
Hệ thống treo là tập hợp tất cả các cơ cấu để nối đàn hồi khung hoặc vỏ ôtô với các cầu hay hệ thống chuyển động.
Hệ thống treo nói chung gồm ba bộ phận chính : Bộ phận đàn hồi, bộ phận hướng, và bộ phận giảm chấn. Mỗi bộ phận đảm nhận nhiệm vụ và chức năng riêng biệt.
+ Bộ phận đàn hồi : Dùng để tiếp nhận và truyền các tải trọng thẳng đứng giảm va đập và tải trọng tác động lên khung vỏ và hệ thống chuyển động, đảm bảo độ êm dịu cần thiết cho ôtô khi chuyển động.
+ Bộ phận dẫn hướng : Dùng để tiếp nhận và truyền lên khung các lực dọc, lực ngang cũng như các mômen phản lực, mômen phanh tác dung lên xe. Động học của bộ phận dẫn hướng xác định đặc tính dịch chuyển tương đối của bánh xe đối với khung và vỏ.
+ Bộ phận giảm chấn : Cùng với ma sát trong hệ thống treo, có nhiệm vụ tạo lực cản, dập tắt các dao động của phần được treo và không được treo, biến cơ năng thành nhiệt năng tiêu tán ra môi trường xung quanh.
Ngoài ba bộ phận chính trên trong hệ thống treo của các ôtô du lịch còn có thêm bộ phận phụ nữa là bộ phận ổn định ngang. Bộ phận này có tác dung làm giảm độ nghiêng và các dao động góc ngang của thùng xe.
1.1.2. Yêu cầu
Hệ thống treo phải đảm bảo được các yêu cầu cơ bản sau :
Đặc tính đàn hồi của hệ thống treo (đặc trưng bởi độ võng tỉnh ft, và hành trình động fđ) phải đảm bảo cho xe có độ êm dịu cần thiết khi chạy trên đường tốt và không bị va đập liên tục lên các ụ hạn chế khi chạy trên đường xấu không bằng phẳng với tốc độ cho phép, khi xe quay vòng tăng tốc hoặc phanh thì vỏ xe không bị nghiêng, ngửa hay chúc đầu.
Đặc tính động học, quyết định bởi bộ phận dẫn hướng phải đảm bảo cho xe chuyển động ổn định và có tính điều khiển cao cụ thể là :
Đảm bảo cho chiều rộng cơ sở và góc đặt các trục quay đứng của bánh xe dẫn hướng không đổi hoặc thay đổi không đáng kể.
Đảm bảo sự tương ứng động học giữa các bánh xe và truyền động lái, để tránh gây ra hiện tượng tự quay vòng hoặc dao động các bánh xe dẫn hướng xung quanh trụ quay của nó.
Giảm chấn phải có hệ số dập tắt dao động thích hợp để dập tắt dao động hiệu quả và êm dịu.
Có khối lượng nhỏ, đặc biệt là phần không được treo.
Kết cấu đơn giản để bố trí, làm việc bền vững tin cậy.
1.2.Các bộ phận chính của hệ thống treo
1.2.1. Bộ phận đàn hồi
+ Chức năng: là bộ phận nối mềm giữa bánh xe và thùng xe, nhằm biến đổi tần số dao động cho phù hợp với cơ thể con người (60-80 lần/ph). Bộ phận đàn hồi có thể bố trí khác nhau trên xe nhưng nó cho phép bánh xe có thể dịch chuyển theo phương thẳng đứng.
Các bộ phận đàn hồi thường được sử dụng:
1. Bộ phận đàn hồi nhíp lá
2. Bộ phận đàn hồi lò xo trụ
3. Bộ phận đàn hồi thanh xoắn.
Hình 1.1Bộ phận đàn hồi
- Nhíp
Nhíp được làm từ các lá thép mỏng, có độ đàn hồi cao, các lá thép có kích thước chiều dài nhỏ dần từ lá lớn nhất gọi là lá nhíp chính. Hai đầu của nhíp chính được uốn lại thành hai tai nhíp dùng để nối với khung xe. Giữa bộ nhíp có các lỗ dùng để bắt bulông siết các lá nhíp lại với nhau. Quang nhíp dùng để giữ cho các lá nhíp khụng bị sê lệch về hai bên, các lá nhíp có thể dịch chuyển tương đối với nhau theo chiều dọc. Khi dịch chuyển tương đối theo chiều dọc, giữa các lá nhíp có lực ma sát, lực ma sát này dùng để dập tắt dao động theo phương thẳng đứng của ôtô. Khi làm việc, mặt trên của lá nhíp sẽ chịu kéo, còn mặt dưới sẽ chịu uốn.
- Lò xo
Lò xo chỉ có chức năng là một cơ cấu đàn hồi khi bộ phận chịu lực theo phương thẳng đứng. Còn các chức năng khác của hệ thống treo sẽ do bộ phận khác đảm nhiệm. Lò xo chủ yếu được sử dụng trong hệ thống treo độc lập, nó có thể đặt ở đọan trên hay đọan dưới của bộ phận dẫn hướng.
- Thanh xoắn
Thanh xoắn giống như lũ xo xoắn loại này cũng chỉ có chức năng đàn hồi khi chịu lực tác dụng theo phương thẳng đứng còn lại chức năng khác do bộ phận khác của hệ thống treo đảm nhận.
Hình 1.2. Thanh xoắn
Thanh xoắn được chế tạo từ thanh thép dài, cú tiết diện tròn, đàn hồi theo chiều xoắn vặn. Một đầu của thanh xoắn được gắn cứng vào khung xe, đầu còn lại gắn vào một tay đòn
Hiện nay bộ phận đàn hồi được làm có xu hướng “mềm mại” hơn nhằm tạo điều kiện cho bánh xe lăn “êm” trên mặt đường.
Hiện nay người ta dùng các bộ phận đàn hồi có khả năng thay đổi độ cứng trong một giới hạn rộng. Khi xe chạy ít tải, độ cứng cần thiết có giá trị nhỏ, khi tăng tải thì độ cứng cần phải có giá trị lớn. Chính vì vậy mà cần phải có thêm các bộ phận đàn hồi phụ như : Nhíp phụ,vấu tỳ bằng cao su biến dạng, đặc biệt là các bộ phận đàn hồi có khả năng thay đổi tự động độ cứng theo tải trọng kết hợp với các bộ phận thay đổi chiều cao trọng tâm của xe.
1.2.2. Bộ phận dẫn hướng
Cho phép các bánh xe dịch chuyển thẳng đứng ở mỗi vị trí của nó so với khung vỏ, bánh xe phải đảm nhận khả năng truyền lực đầy đủ. Bộ phận dẫn hướng phải thực hiện tốt chức năng này. Trên mỗi hệ thống treo thì bộ phận dẫn hướng có cấu tạo khác nhau. Quan hệ của bánh xe với khung xe khi thay đổi vị trí theo phương thẳng đứng được gọi là quan hệ động học.
Khả năng truyền lực ở mỗi vị trí được gọi là quan hệ động lực học của hệ treo. Trong mối quan hệ động học các thông số chính được xem xét là : sự dịch chuyển (chuyển vị) của các bánh xe trong khụng gian ba chiều khi vị trí bánh xe thay đổi theo phương thẳng đứng (Dz).Mối quan hệ động lực học được biểu thị qua khả năng truyền các lực và các mômen khi bánh xe ở các vị trí khác nhau.
1.2.3. Bộ phận giảm chấn
Đây là bộ phận hấp thụ năng lượng dao động cơ học giữa bánh xe và thân xe. Bộ phận giảm chấn có ảnh hưởng tới biên độ dao động. Trên các xe hiện đại chỉ dùng loại giảm chấn ống thuỷ lực có tác dụng hai chiều trả và nén. Trong hành trình trả (bánh xe đi xa khung và vỏ) giảm chấn có nhiệm vụ giảm bớt xung lực va đập truyền từ bánh xe lên khung.
Trên xe otô giảm chấn được sử dụng với mục đích sau:
- Giảm và dập tắt các va đập truyền lên khung khi bánh xe lăn trên nền đường không bằng phẳng nhằm bảo vệ được bộ phận đàn hồi và tăng tính tiện nghi cho người sử dụng .
- Đảm bảo dao động của phần khụng treo ở mức độ nhỏ nhất, nhằm
làm tốt sự tiếp xúc của bánh xe với mặt đường.
-Nâng cao các tính chất chuyển động của xe như khả năng tăng tốc ,
khả năng an toàn khi chuyển động.
1.2.4. Thanh ổn định
Hình 1.3. Thanh ổn định
Trên xe con thanh ổn định hầu như đều có. Trong trường hợp xe chạy trên nền đường không bằng phẳng hoặc quay vòng, dưới tác dụng của lực li tâm phản lực thẳng đứng của 2 bánh xe trên một cầu thay đổi sẽ làm cho tăng độ nghiêng thùng xe và làm giảm khả năng truyền lực dọc, lực bền của bánh xe với mặt đường. Thanh ổn định có tác dụng khi xuất hiện sự chênh lệch phản lực thẳng đứng đặt lên bánh xe nhằm san bớt tải trọng từ bên cầu chịu tải nhiều sang bên cầu chịu tải ít hơn. Cấu tạo chung của nó có dạng chữ U. Các đầu chữ U nối với bánh xe còn thân nối với vỏ nhờ các ổ đỡ cao su.
1.2.5. Các vấu cao su tăng cứng và hạn chế hành trình
Trên xe con các vấu cao su thường được đặt kết hợp trong vỏ của giảm chấn. Vấu cao su vừa tăng cứng vừa hạn chế hành trình của bánh xe nhằm hạn chế hành trình làm việc của bánh xe.
1.2.6. Các cơ cấu điều chỉnh hoặc xác định góc bố trí bánh xe
Hệ thống treo đảm nhận mối liên kết giữa bánh xe và thựng vỏ, do vậy trên hệ thống treo có thêm các cơ cấu điều chỉnh hoặc xác định góc bố trí bánh xe. Các cơ cấu này rất đa dạng nên ở mỗi loại xe lại có cách bố trí khác nhau, các loại khác nhau.
1.3.Các thông số tương đương và mô phỏng hoạt động
1.3.1. Các thông số tương đương
- Phần được treo: Là bộ phận chủ yếu của ôtô bao gồm: khung, thùng, hệ thống động cơ và các chi tiết bộ phận khác gắn trên thùng xe hoặc khung xe. Toàn bộ khối lượng của các bộ phận này được đỡ trên hệ thống treo.
- Phần khung được treo gồm có: Cầu , dầm cầu, hệ thống chuyển động (cụm bánh xe ), cơ cấu dẫn động . Các bộ phận này đặt dưới hệ thống treo.
- Có một số chi tiết và bộ phận vừa được lắp lên phần được treo vừa được lắp lên phần khụng được treo như: nhíp, lò xo, giảm chấn, trục cardan. Do đó một phần khối lượng của chúng được xem như thuộc phần được treo và nửa kia thuộc phần không được treo.
1.3.2. Mô phỏng hoạt động
a. Khi cầu sau của ôtô được nâng lên.
b. khi cầu trước của ôtô được nâng lên.
Hình 1.4. Dao động của ụtụ
+ M - Khối lượng phần được treo.
+ Kt , Ks - Hệ số độ cứng của bộ phận đàn hồi phía trước và sau.
+ Ct , Cs - Hệ số độ cứng của bộ phận giảm chấn phía trước và phía sau.
+ mt , ms - khối lượng của những phần khung được treo.
c. Trạng thái cân bằng d. Trạng thái nghiêng ngang.
Hình 1.5. Mô hình khi ô tô dao động ngang
CHƯƠNG 2
LỰA CHỌN PHƯƠNG ÁN THIẾT KẾ
Hiện nay ở trên xe ôtô hệ thống treo bao gồm 2 nhóm chính:
1-Hệ thống treo phụ thuộc 2- Hệ thống treo độc lập
Hình 2.1. Hệ thống treo
2.1. Hệ thống treo phụ thuộc
Đặc trưng của hệ thống treo phụ thuộc là các bánh xe lắp trên một dầm cầu cứng. Trong trường hợp cầu xe là bị động thì dầm đó là một thanh thép định
hình, còn trường hợp là cầu chủ động thì dầm là phần vỏ cầu trong đó có một phần của hệ thống truyền lực.
Đối với hệ treo này thì bộ phận đàn hồi có thể là nhíp lá hoặc lò xo xoắn ốc, bộ phận dập tắt dao động là giảm chấn.
Hình 2.2. Hệ thống treo phụ thuộc sử dụng nhíp
Nếu bộ phận đàn hồi là nhíp lá thì nhíp đóng vai trò là bộ phận dẫn hướng, có thể dựng thêm giảm chấn hoặc khụng.
1.Dầm cầu 2.Lò xo xoắn ốc 3. Giảm chấn
4.Đòn dọc dưới 5.Đòn dọc trên 6. Thanh giằng Panhada
Hình 2.3. Treo phụ thuộc loại lò xo xoắn ốc
Nếu như bộ phận đàn hồi là lò xo xoắn phải dựng thêm hai đòn dọc dưới và một hoặc hai đòn dọc trên. Đòn dọc dưới được nối với cầu, đòn dọc trên được nối với khớp trụ . Để đảm bảo truyền được lực ngang và ổn định vị trí thùng xe so với cầu người ta cũng phải dựng thêm “đòn Panhada”, một đầu nối với cầu còn đầu kia nối với thùng xe.
Lò xo xoắn ốc trong trường hợp này có thể đặt trên đòn dọc hoặc đặt ngay trên cầu. Giảm chấn thường được đặt trong lòng lò xo xoắn ốc để chiếm ít không gian.
*Cấu tạo của hệ thống treo phụ thuộc có những ưu nhược điểm:
- Nhược điểm:
- Khối lượng phần liên kết bánh xe (phần khung được treo) lớn, đặc biệt là ở cầu chủ động. Khi xe chạy trên đường không bằng phẳng, tải trọng động sinh ra sẽ gây nên và đập mạnh giữa phần không treo và phần treo làm giảm độ êm dịu chuyển động. Mặt khác bánh xe va đập mạnh trên nền đường sẽ làm xấu sự tiếp xúc của bánh xe với đường.
- Khoảng không gian phía dưới sàn xe phải lớn để đảm bảo cho dầm cầu có thể thay đổi vị trí, do vậy chỉ có thể lựa chọn là chiều cao trọng tâm lớn
Hình 2.4. Sự thay đổi vị trí bánh xe và của xe khi xe trèo lên mô đất.
-Sự nối cứng bánh xe 2 bên bờ dầm liên kết gây nên hiện tượng xuất hiện chuyển vị phụ khi xe chuyển động.
- Ưu điểm:
-Trong quá trình chuyển động vết bánh xe được cố định do vậy không xảy ra hiện tượng mòn lốp nhanh như hệ thống treo độc lập.
-Khi chịu lực bên (lực li tâm, đường nghiêng). 2 bánh xe liên kết cứng bởi vậy hạn chế hiện tượng trượt bên bánh xe.
-Công nghệ chế tạo đơn giản, dễ tháo lắp và sửa chữa.
-Giá thành thấp
*Vấn đề sử dụng hệ thống treo phụ thuộc:
Do yêu cầu của thực tế và do trình độ phát triển của kỹ thuật thì tốc độ của ô tô ngày càng được nâng cao. Khi tốc độ ô tô ngày càng cao thì yêu cầu về kỹ thuật của ô tô ngày càng khắt khe : trọng tâm của ô tô cần phải được hạ thấp. Vấn đề ổn định lại phải tốt, trọng lượng phần khụng được treo nhỏ để tăng sự êm dịu khi chuyển động. Vì lí do như vậy mà hệ thống treo phụ thuộc không được sử dụng trên xe có vận tốc cao, có thì chỉ được sử dụng ở những xe có tốc độ trung bình trở xuống và những xe có tính năng nhiệt độ cao.
2.2. Hệ thống treo độc lập
- Đặc điểm :
- Trên hệ thống treo độc lập dầm cầu được chế tạo rời, giữa chúng liên kết với nhau bằng khớp nối, bộ phận đàn hồi là lò xo trụ, bộ giảm chấn là giảm chấn ống. Trong hệ thống treo độc lập hai bánh xe trái và phải không quan hệ trực tiếp với nhau vì vậy khi chúng ta dịch chuyển bánh xe này trong mặt phẳng ngang bỏnh xe cũn lại vẫn giữ nguyên. Do đó động lực học của bánh xe dẫn hướng sẽ giữ đúng hơn hệ thống treo phụ thuộc.
- Khi ô tô chuyển động trên đường b. Khi một bánh xe trong hệ thống treo
không bằng phẳng độc lập- được nâng lên và hạ xuống
Hình 2.5.Hệ thống treo độc lập của ôtô hoạt động trên đường không bằng phẳng.
- Ưu điểm của hệ thống treo độc lập:
+ Khối lượng phần khụng được treo nhỏ, đặc tính bám đường của bánh xe tốt vì vậy sẽ êm dịu khi chuyển động và có tính ổn định tốt.
+ Các lò xo chỉ làm nhiệm vụ đỡ thân ôtô mà không phải làm nhiệm vụ dẫn hướng nên có thể làm lò xo mềm hơn nghĩa là tính êm dịu tốt hơn.
+ Do không có sự nối cứng giữa các bánh xe bên trái và bên phải nên có thể hạ thấp sàn ôtô và vị trí lắp động cơ. Do đó mà có thể hạ thấp trọng tâm ôtô.
- Nhược điểm:
+ Kết cấu phức tạp.
+ Khoảng cách bánh xe và các vị trí đặt bánh xe thay đổi cùng với sự dịch chuyển lên xuống của các bánh xe.
- Trong hệ thống treo độc lập còn được phân ra các loại sau :
+ Dạng treo 2 đòn ngang
+ Dạng treo M.Pherson
+ Dạng treo kiểu đòn dọc
+Dạng treo kiểu đòn dọc có thanh ngang liên kết
2.2.1. Dạng treo 2 đòn ngang
1- Bánh xe. 2- Đòn trên. 3 - Khung xe.
4- Trụđứng 5- Khớp cầu trên. 6 - Khớp cầu dưới.
7- Đòn dưới. 8- Lò xo. 9- Giảm chấn.
Hình 2.6. Hệ thống treo hai đòn ngang.
*Đặc điểm :
Cấu tạo của hệ treo 2 đòn ngang bao gồm 1 đòn ngang trên, một đòn ngang dưới. Các đầu trong được liên kết với khung, vỏ bằng khớp trụ. Các đầu ngoài được liên kết bằng khớp cầu với đòn đứng. Đòn đứng được nối cứng với trục bánh xe. Bộ phận đàn hồi có thể nối giữa khung với đòn trên hoặc đòn dưới. Giảm chấn cũng đặt giữa khung với đòn trên hoặc đòn dưới. Hai bên bánh xe đều dùng hệ treo này và được đặt đối xứng qua mặt phẳng dọc giữa xe.
Hệ treo trên 2 đòn ngang (hình 2.6) được sử dụng nhiều trong các giai đoạn trước đây nhưng hiện nay hệ treo này đang có xu hướng ít dần do kết cấu phức tạp, chiếm khoảng không gian quá lớn.
2.2.2. Dạng treo Mc.Pherson
1- Lò xo trụ. 2- Đòn ngang chữ A.
3, 4- Khớp trụ liên kết đòn ngang với khung.
5- Khớp cầu. 6 – Giảm chấn
Hình 2.7. Hệ thống treo Mc.pherson.
*Đặc điểm:
Hệ treo này chính là biến dạng của hệ treo 2 đòn ngang. Coi đòn ngang trên có chiều dài bằng 0 và đòn ngang dưới có chiều dài khác 0. Chính nhờ cấu trúc này mà ta có thể có được khoảng không gian phía trong để bố trí hệ thống truyền lực hoặc khoang hành lý. Sơ đồ cấu tạo của hệ treo bao gồm : một đòn ngang dưới, giảm chấn đặt theo phương thẳng đứng, một đầu được gối ở khớp cầu B. đầu còn lại được bắt vào khung xe. Bánh xe được nối cứng với vỏ giảm chấn. Lò xo cú thể được đặt lồng giữa vỏ giảm chấn và trục giảm chấn.
Nếu ta so sánh với hệ treo 2 đòn ngang thì hệ treo Mc.Pherson kết cấu ít chi tiết hơn, không chiếm nhiều khoảng không và có thể giảm nhẹ được trọng lượng kết cấu. Nhưng nhược điểm chủ yếu của hệ treo Mc.Pherson là do giảm chấn vừa phải làm chức năng của giảm chấn lại vừa làm nhiệm vụ của trụ đứng nên trục giảm chấn chịu tải lớn nên giảm chấn cần phải có độ cứng vững và độ bền cao hơn do đó kết cấu của giảm chấn phải có những thay đổi cần thiết.
2.3 Sơ đồ cấu tạo và nguyên lý làm việc của hệ thống treo xe HYUNDAI CRETA
2.3.1 Kết cấu của hệ thống treo trước
Hình 2.11 Kết cấu của hệ thống treo trước xe HYUNDAI CRETA
2.3.2 Kết cấu của hệ thống treo sau
Hình 2.12 kết cấu hệ thống treo sau xe HYUNDAI CRETA
Hệ thống treo sau có cấu trúc 4 điểm liên kết với lò xo cuộn và tay đòn biên cho hiệu quả giảm xóc tuyệt vời như dòng xe du lịch.
Hoạt động của hệ thống treo: Khi xe đi trên những đoạn đường xấu, chạy với vận tốc cao và khi xe quay vòng trong quá trình hoạt động phản lực từ mặt đường sẽ tác dụng trực tiếp lên bánh xe truyền đến hệ thống treo, lên vỏ xe và đến hành khách ngồi trên xe. Hệ thống treo có nhiệm vụ tạo cảm giác an toàn và thoải mái cho người lái và hành khách trên xe thông qua kết cấu của nó. Lò xo trụ có tác dụng tạo cảm giác êm ái không bị xóc nhưng nó không tự giảm được chu kỳ dao động của chính nó sau mỗi va chạm vì vậy cần có thêm bộ phận hấp thụ những dao đồng này đó chính là giảm chấn. Giảm chấn có tác dụng hấp thụ toàn bộ năng lượng dao động từ mặt đường truyền lên nhờ kết cấu của các van thông qua cùng áp lực của chất lỏng, giảm chấn biến năng lượng dao động thành nhiệt năng tỏa ra ngoài môi trường. Đi cùng với hệ thống treo là các thanh cân bằng ngang và các tay đòn biên làm tăng tính ổn định, an toàn cho xe khi quay vòng.
2.3.3 Kết cấu, nguyên lý làm việc của một số phần tử trên hệ thống treo xe HYUNDAI CRETA
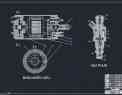
2.3.3.1 Lò xo trụ
- Kết cấu
a) lò xo trụ phía trước; b) lò xo trụ phía sau
Hình 2.13 Kết cấu của lò xo trụ
- Hoạt động : Khi chịu tác dụng của tải trong thẳng đứng, do tính chất đàn hồi của thép lò xo mà lò xo bị nén lại, khi tải trọng thôi không tác dụng thì lò xo lại giãn ra quá trình đó cứ lặp đi lặp lại trọng quá trình ôtô chuyển động. Lò xo trước có dạng hình côn điều này giúp nó có khả năng thay đổi độ cứng hợp lý tưởng ứng với tải trọng đặt lên nó.
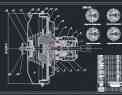
2.3.3.2 Giảm chấn
- Kết cấu
a) Cấu tạo chung; b) Hành trình trả; c) Hành trình nén
1 Pít tông cụm van 2 Đế lò xo 3 Xylanh công tác
4 Cần Pít tông 5 Lỗ van trả 6 Lỗ van nén.
Hình 2.14 Cấu tạo và nguyên lý hoạt động của giảm chấn ống tác dụng hai chiều trên xe HYUNDAI CRETA
- Nguyên lý hoạt động của giảm chấn
- Nén nhẹ (bánh xe và thân xe tiến lại gần nhau) áp suất dầu trong buồng C tăng lên một chút sẽ có một phần dầu từ C đi qua những lỗ van không bị bịt kín ở hàng L để về buồng B. Đồng thời cũng có một lượng dầu nhỏ qua van nén F về khoang D gọi là khoang bù (lúc nén nhẹ van nén E chưa mở được vì không thắng được lực căng của lò xo) lượng dầu lưu thông ít dập tắt chậm những dao động nhỏ.
- Trả nhẹ (bánh xe và thân xe tách xa nhau) áp suất trong buồng C giảm không nhiều nên chưa mở được van trả L chỉ có một lượng dầu nhỏ từ khoang B qua những lỗ nhỏ L không bị bịt kín, dầu từ khoang bù qua một phần van K về buồng C.
- Nén mạnh (bánh xe và thân xe tiến vào nhau mạnh đột ngột) dầu ở khoang C áp suất tăng đột ngột mở toàn bộ hàng van E và qua một số lỗ nhỏ ở hàng L không bịt kín để lên khoang B. Đồng thời mở toàn bộ van F để sang khoang bù D. Lượng dầu lưu thông nhiều dập tắt nhanh dao động.
- Trả mạnh (bánh xe tách khỏi thân xe đột ngột) áp suất trong buồng C giảm nhiều, lúc đó dầu từ khoang B đẩy mở toàn bộ van trả L để về buồng C. Dầu từ khoang bù D mở toàn bộ van trả (hàng lỗ) K để về khoang C dầu lưu thông nhiều dập tắt nhanh dao động.
2.3.3.3 Tay đòn trên
Hình 2.15. Tay đòn trên
2.3.3.4 Tay đòn dưới
Hình 2.16. Tay đòn dưới
Kết luận: Sử dụng hệ thống treo trước độc lập loại Macpherson với lò xo cuộn đòn kép và thanh cân bằng làm tăng khả năng an toàn cho xe và tạo cảm giác thoải mái tối đa cho hành khách trong những chuyến đi xa.
CHƯƠNG 3
TÍNH TOÁN THIẾT KẾ HỆ THỐNG TREO XE HYUNDAICRETA
3.1. Xác định các thông số cơ bản của hệ thống treo
3.1.1. Các thông số ban đầu
Nhóm các thông số tải trọng:
- Tải trọng toàn xe khi không tải G0 = 12800 N.
- Tải trọng toàn xe khi đầy tải GT = 17300 N.
- Tải trọng đặt lên cầu trước khi không tải G10 = 7000 N.
- Tải trọng đặt lên cầu trước khi đầy tải G1T = 8500 N.
- Tải trọng đặt lên cầu sau khi không tải G20 = 5800 N.
- Tải trọng đặt lên cầu sau khi đầy tải G2T = 8800 N.
- Chiều dài cơ sở : L = 2630 (mm).
- Chiều rộng cơ sở : B = 1480 (mm).
- Dài´Rộng´Cao : 4490´1710´1425
- Kích thước bánh xe : Kớ hiệu lốp 185/65 R14 H.
- Khoảng sáng gầm xe khi đầy tải : Hmin = 100 (mm).
- Khối lượng phần không treo : mkt = 11x2 = 22 Kg .
- Khối lượng phần bánh xe : mbx = 16 Kg.
- Vết bánh xe: trước =1300(mm).
sau = 1310(mm).
Ne max = 110 (ml) / 6000 (v/ph). vmax = 195 (km/h).
Me max = 145 (N.m) / 4800 (v/ph).
3.1.2. Thông số cơ bản của HTT
Có rất nhiều các thông số đánh giá độ êm dịu của ôtô khi chuyển động như tần số dao động , gia tốc dao động và vận tốc dao động .
Trong đồ án này ta đánh giá độ êm dịu của ôtô thông qua tần số dao động của HTT.
Đối với ôtô con tần số dao động n = 60 ¸ 90 lần/ph để đảm bảo phù hợp với dao động của con người .
a. Xác định độ cứng của lò xo.
Độ cứng của lò xo Ct được tính toán theo điều kiện kết quả tính được phải phù hợp với tần số dao động trong khoảng n = 60 ¸ 90 l/ph .
Độ cứng của hệ thống treo được tính toán theo công thức :
Ct = .w2 với w = ()2
Ta tính theo công thức sau:
w = = = 7.45 (rad/s).
- Khối lượng phần không treo : mkt = 22 kg .
- Khối lượng phần treo ở trạng thái không tải : MT0 = m10 - mkt - mbx
Û MT0 = 700 -22 - 16x2 = 646 Kg.
m10 _ tải trọng đặt lên cầu trước khi không tải m10 = 700 Kg.
- Khối lượng phần treo ở trạng thái đầy tải : MT1 = m1T - mkt - mbx
Û MT1 = 850 - 22 - 16x2 = 796 Kg.
m1T _ tải trọng đặt lên cầu trước khi đầy tải m1T = 850 Kg.
Độ cứng của một bên hệ treo ở trạng thái không tải :
C = .w2 = x7.452= 17927 N/m = 17.927 (N/mm).
- Độ cứng của một bên hệ treo ở trạng thái đầy tải :
C = .w2 = x7.452= 22090 N/m = 22.09 (N/mm).
- Độ cứng của một bên hệ treo lấy từ giá trị trung bình :
C = = x(17927 + 22090) = 20008.5 N/m = 20.008 (N/mm).
- Xác định hành trình tĩnh của bánh xe (Độ vừng tĩnh của hệ treo).
- Độ vừng tĩnh của hệ treo (khi đầy tải) :
ft = . = = 195 (mm).
- Kiểm nghiệm lại độ vừng tĩnh C = 20008 N/m.
Từ công thức : f =
+ ở chế độ không tải : f = = = 158 (mm).
Mà : f = Þ = = 62.08
Þ = = 7.88 (rad/s).
Từ công thức : n = = = 75.2 (l/ph) .
+ ở chế độ đầy tải : f = = = 195 (mm).
Mà : f = Þ = =50.3
Þ = = 7.09 (rad/s).
Từ công thức : n = = = 67.7 (l/ph) .
Qua kiểm nghiệm ta thấy ở cả hai chế độ không tải và đầy tải tần số dao động đều nằm trong khoảng 60 ¸ 90 (l/ph) đảm bảo được yêu cầu đặt ra . Do đó với bộ phận đàn hồi có độ cứng C = 20.008 (N/mm) thoả mãn được yêu cầu tính toán thiết kế .
- Xác định hành trình tĩnh của bánh xe: hay chính là độ vừng tĩnh của hệ treo
ft = = = 0.18 (m).
c. Xác định hành trình động của bánh xe (độ vững động của hệ treo )
Ta có: fđ = (0.7 ¸1.0) ft
Chọn: fđ = 0,8 ft = 0,8 . 180 = 144 (mm).
èTổng hành trình của bánh xe (tính từ vị trí bánh xe bắt đầu chịu tải đến lúc chạm vào vấu tỳ hạn chế):
fTổng = fđ + ft =144 + 180 = 324 (mm).
Sử dụng kết quả này để đặt ụ cao su hạn chế hành trình trên và dưới của bánh xe. Với ụ hạn chế bằng cao su lấy đoạn biến dạng bằng 0,1 ¸ 0,2 của toàn bộ chiều dài ụ.
d. Kiểm tra hành trình động của bánh xe
Theo điều kiện : fđ £ H0 - Hmin
Trong đó :
- H0 : khoảng sáng gầm xe ở trạng thái chịu tải tĩnh
- Hmin : khoảng sáng gầm xe tối thiểu = 100 mm
Þ H0 ³ fđ + Hmin = 144 + 100 = 244 mm.
Þ H0 ³ 244 mm.
* Đối với cầu trước cần kiểm tra hành trình động để khụng xẩy ra va đập cứng vào ụ đỡ trước khi phanh :
Khi phanh dưới tác dụng của lực quán tính , trọng tâm của xe sẽ dịch chuyển và đầu xe sẽ bị xuống , lúc này fđ sẽ thay đổi .
Từ công thức : fđ ³ ft . jmax.
Trong đó :
- Hệ số bám . jmax = 0.75
- Khoảng cỏch từ trọng tâm xe đến cầu sau b =L.55% =2630x55% =1.446m
- Chiều dài cơ sở xe L = 2630 mm.
- Chiều cao cơ sở xe hg = 500 mm.
(Hình 3.1)
Þ fđ ³ 180 x 0.7x = 46.68 mm.
èThỏa mãn.
* Xác định độ vừng tĩnh của hệ treo ở trạng thái không tải tĩnh :
f0T = = x180 = 146(mm).
- Xác định hệ số cản trung bình của giảm chấn : KTB
Hệ số dập tắt dao động của hệ treo :
D = 2 x y x w (rad/s).
Trong đó :
- y : Hệ số cản tương đối y = 0,2. (y = 0.15 ữ 0.3)
- w = 7.45 (rad/s).
Þ D = 2 x 0.2 x 7.45 = 2.98 (rad/s).
- Hệ số cản trung bình của giảm chấn quy dần về bánh xe :
KTB = x D x = x 2.98 x = 120.9 (Ns/m).
Số liệu cơ sở để tính toán
- Chiều rộng cơ sở của xe ở cầu trước BT = 1480 mm.
- Bán kính bánh xe : Kí hiệu lốp 185/65 R14 H. Rbx=298 mm.
- Góc nghiêng ngang trụ xoay đứng(góc Kingpin): d0= 10o.
- Sự thay đổi góc nghiêng ngang trụ đứng Dd = 2o.
- Góc nghiêng ngang bánh xe(góc Camber): go=0o.
- Bỏn kính bánh xe quay quanh trụ đứng ro = -15 mm.
- Khoảng sáng gầm xe: Hmin =110 mm.
- Độ vững tĩnh fT = 180 mm.
- Độ vững động fđ = 144 mm.
- Độ vững của hệ treo ở trạng thái không tải f0T = 146 mm .
- Chiều dài trụ đứng Kr = 150 mm.
- Chiều cao tai xe lớn nhất Ht max = 800 mm.
- Tâm quay tức thời của thùng xe nằm dưới mặt đường hs = 50 mm.
3.2. Động học hệ treo mc.pherson
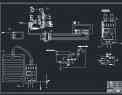
3.2. 1 Xác định độ dài càng chữ A và vị trí các khớp (phương pháp đồ thị)
Các bước cụ thể như sau : (Vẽ với tỉ lệ 1: 2 )
- Kẻ đường nằm ngang biểu diễn mặt phẳng đường : dd
- Vẽ đường trục đối xứng ngang của xe Aom: Aom vuụng gúc với dd.
- Trên Aom đặt :
AoA1 = Hmin = 110 mm.
A1A2 = fđ = 144 mm.
A2A3 = fT = 180 mm.
A3A4 = f0T = 146 mm.
AoA5 = hs = 50 mm.
- Trên Aod đặt AoBo = B/2 = 740 mm.
- Bo là điểm tiếp xúc của bánh xe với mặt đường .
- Tại Bo dựng Boz vuông góc với dd.
- Trên đoạn AoBo đặt BoCo = |ro|=15 mm.
- Tại Co dựng Con tạo với phương thẳng đứng một góc do=10o .
- Trên Boz đặt BoB=rbx=298 mm.
- Tại B dựng đường vuông góc với Boz cắt Con tại C2 . C2là điểm nối cứng của trụ bánh xe với trụ xoay đứng .
- Trên Con từ C2 đặt về phía trên và phía dưới các đoạn :
C2C1 = = = 75 mm.
C1, C2 là tâm quay ngoài của hai đòn ngang ở vị trí không tải
Bằng cách tương tự ta sẽ tìm được vị trí khớp ngoài của đòn ngang ở vị trí đầy tải như sau : Khi hệ treo biến dạng lớn nhất , nếu coi thựng xe đứng yên thì bánh xe sẽ dịch chuyển tịnh tiến lên tới điểm B1.
Hình 3.2: Đồ thị xác định chiều dài đòn ngang
Nếu coi khảng cách giữa hai vết bánh xe ở trạng thái này là không đổi so với trạng thái khi không tải .
Khi đó BoB1 = fđ + ft - fot.
- Từ B1 kẻ đường B1q //dd.
- Trờn B1q đặt B1D1 = BoC0 = |ro|
Nối D1O2 thì D1O2 là đường tâm trụ xoay đứng ở vị trí hệ treo biến dạng lớn nhất.Trong quá trình chuyển dịch bánh xe,k/c CoC1 không thay đổi,do đó trên D1O2 ta lấy D1D2 = CoC1.D2 là vị trí khớp cầu ngoài của đòn ngang ứng với trạng thái hệ treo biến dạng lớn nhất.
Như vậy C1 và D2 sẽ cùng nằm trên một cung tròn có tâm là khớp trong của đòn dưới .
- Kẻ đường trung trực kk của C1D2.
- Từ A4 kẻ đường tt // dd.
- Xác định giao điểm O1 của tt với kk. O1 chính là tâm khớp trụ trong của đòn ngang .
Khoảng cách từ O1 tới đường đối xứng của xe phải sao cho có thể bố trí khoang chứa hàng hoặc cụm máy . Nếu nó không phù hợp thì có thể cho thay đổi khoảng sáng gầm xe trong giới hạn cho phép .
- Nếu kéo dài O1C1 và kẻ đường vuông góc với O2Co thì chúng gặp nhau tại P ( tâm quay tức thời của bánh xe ).
- Nối PBo và kéo dài cắt Aom tại S(S là tâm quay tức thời của cầu xe cũng như là thùng xe trong mặt phẳng ngang cầu xe ).
- Đo khoảng cách O1C1 rồi nhìn tỉ lệ ta đựơc độ dài đòn chữ ‘A’ của hệ treo :
Ld = 370 mm.
Phương pháp tính chiều dài đòn ngang Ld ,theo phương pháp giải tích
Trong hệ tọa độ Đề-Các (XOY), cho 2 điểm A và B đó biết:
A (xA , yA)
B (xB , yB)
Ta có: xem hình (3.2) dưới đây
+ Phương trình đường thẳng AB là:
y = .
+2 Khoảng cách giữa hai điểm A và B là:
lAB = .
+3 Phương trình đường thẳng (d) vuông góc với (AB) tại điểm C là:
y = ;
với điều kiện: yC = .
Trình tự xác định kích thước đòn ngang bằng phương pháp giải tích:
●1 Trước hết coi mặt phẳng [zB0d_d] như là hai trục tọa độ của hệ tọa độ
Đề-Các:
_ trục hoành _ trục tung
B0 _ gốc tọa độ.
●2 Xác định được tọa độ điểm B: B0B = rbx
B B0z.
●3 Xác định được tọa độ điểm C0: B0C0 = r0
C0 dd.
●4 Xác định được phương trình đường thẳng C0n
hệ số góc là (900 - )
đi qua điểm C0.
●5 Xác định được tọa độ điểm O2: O2 C0n
k/cách từ O2 tới dd là:750(đơn vị).
- 6 Xác định được phương trình đường thẳng BC2
BC2 B0z
đi qua điểm B.
è Xác định được tọa độ điểm C2, là giao điểm của hai đường thẳng
BC2 và C0n.
- 7 Xác định được tọa độ điểm C1: C2C1 = Kr/2
C1 C0n. (*).
- 8 Xác định được tọa độ điểm B1: B0B1 = fđ + ft + fot
B1 B0z.
- 9 Xác định được tọa độ điểm D1: B1D1 B0z
B1D1 = r0.
- 10 Khi đó được phương trình đường thẳng D1O2
è biết tọa độ của hai điểm D1 và O2.
- 11 Xác định được tọa độ điểm D2: D2 D1O2
D1D2 = C0C1 (tính được).
- 12 Xác định được phương trình đường trung trực của đoạn thẳng C1D2
( gọi là đường thẳng: l) biết điểm C1
biết điểm D2.
- 13 Xác định được phương trình đường thẳng p: p // dd
đường thẳng p cách gốc tọa độ B0 một đoạn là: ( hg + fđ + ft - fot ).
- 14 Giao điểm của hai đường thẳng: l và p lúc này sẽ là:
l giao p tại điểm O1.
à Xác định được tọa độ điểm O1. (**).
è Từ (*) và (**), tính ra được khoảng cách:
Ld = O1C1 = 370 (mm).
3.2.2. Đồ thị động học để kiểm tra động học hệ treo
Khi hệ treo biến dạng thì các góc nghiêng ngang trụ đứng, khoảng cách giữa hai vết lốp sẽ thay đổi.
Các điểm tiếp xúc của bánh xe với mặt đường là: 0, 1, 2, 3, 4.
Các góc nghiêng ngang trụ đứng lần lượt là: d0, d1, d2, d3, d4.
Hình 3.4. Đồ thị động học
3.2.3. Mối quan hệ hình học của hệ treo Mc.Pherson
Ta có sơ đồ hình học của hệ thống treo:
Hình 3.5.Mối quan hệ hình học giữa các góc đặt
Từ đồ thị động học đó xây dựng ở trên ta có độ dài các đoạn:
ld = O1C = 297,88 (mm).
O1O = 192,65 (mm).
O2O = 596 (mm).
+ ở trạng thái tĩnh, ta có:
CC2 = ld*sinα ;
+ Khi bánh xe chuyển vị lên một đoạn là: ÄH, thí điểm C sẽ dịch chuyển trên cung tròn tâm O1 bán kính là ld một đoạn là: CC’ và đòn ngang sẽ quay đi một gúc làÄỏ.
Lúc này góc giữa đòn ngang và phương ngang ban đầu sẽ là: α – Δα.
+ Khi đó ta có thể coi điểm C’ gần như thẳng đứng nằm trên phương CC2.
Do đó:
C’C2 = ld*sin(α – Δα) ;
_Hình 3.6_
+ Và ta có C’C2 chính là đoạn chuyển vị của bánh xe theo phương thẳng đứng.Tức là: C’C2 = ΔH
Suy ra, ta có:
ΔH = ld* sin(α – Δα) ;
ð sin(α – Δα) = ;
ð α – Δα = arcsin() ;
ð Δα = α - arcsin() .(0).
+ Ta lại có:
CC’ = ld*tg Δα ;
Và:
C’C’’ = CC’*sin Δα ;
Mà độ sai lệch vết lốp xe ΔB chính bằng:
ΔB = 2. C’C’’ = 2.ld. tg Δα. sin Δα .(1).
+Ta xét mối quan hệ giữaαvà δ:
Từ hình vẽ trên ta có độ dài của các đoạn:
OC1 = ld . sinα;
Và: OC2 = O2C1.tangδ = (OO2 + OC1).tangδ ;
Mặt khác thì ta có: OC2 = O1C2 - OO1 = ld.cosδ - OO1 ;
Vậy ta suy ra: OC2 = ld.cosα - OO1 = (OO2 + OC1).tangδ ;
=> ld.cosα - OO1 = (OO2 + ld.sinα)tangδ;
Suy ra: tangδ = ld.cosα - OO1/(OO2 + ld.sinα) ;
Vậy: δ = arctang.
.
3.2.4. Đồ thị động học hệ treo Mc.Pherson
Bằng cách xây dựng đồ thị động học của hệ treo (hình 2.7) với các thông số đó tính toán ở phần trên ta xác định được sự thay đổi chiều rộng cơ sở B và góc nghiêng ngang của trụ xoay đứng .Kết quả đưa ra trên đồ thị quan hệ giữa chúng với sự biến dạng của hệ treo như sau :
_Hình 3.7_
3.3. Động lực học hệ treo Mc.Pherson
3.3.1. Các chế độ tải trọng tính toán
- Trường hợp lực kéo và lực phanh cực đại
Trên sơ đồ phân tích lực tồn tại lực Z,X nhưng tính với giá trị cực đại (vắng mặt lực Y).
Tính trong trường hợp chỉ chịu lực phanh cực đại:
+ Z = Ztt = = = 5100 (N).
Trong đó:
Ztt - tải trọng thẳng đứng tính toán cho một bên bánh xe.
mp - hệ số phân bố tải trọng khi phanh gấp, mp = 1.2
G1 - trọng lượng tĩnh đặt trên cầu trước (khi đầy tải).
+ X = Xmax = Ztt* φ = 5100*0.75 = 3820 (N).
Trong đó:
Xmax - lực dọc lớn nhất tác dụng tại điểm tiếp xúc của
bánh xe với mặt đường.
φ - hệ số bám dọc lấy bằng 0.75
Gbx - khối lượng cụm bánh xe (gồm bánh xe,larăng và cơ
cấu phanh), Gbx = 270(N).
b. Trường hợp lực ngang cực đại
Trên sơ đồ có mặt lực Z và Y (vắng mặt X).
Các lực được tính toán như sau:
+ Z = = * - Gbx ;
= * - 27 = 20860 (N).
Trong đó
B - chiều rộng vết bánh xe, B = 1.480 (m).
hg - chiều cao trọng tâm xe, hg = 0.5 (m).
φ*y- hệ số gia tốc ngang, lấy bằng 0.6g.
φy - hệ số bám ngang, lấy bằng 1.
+ Y = Ytt = **φy = 7120 (N);
= **1 = 21130 (N).
- . Trường hợp chịu tải trọng động
Trên sơ đồ chỉ có lực Z (vắng mặt X,Y).
Ta có:
Z = Zt*kd = = 8500 (N).
- Trong đó:
G1- tải trọng đặt trên cầu trước.
kd- hệ số tải trọng động, kd = 1.8 - 2.5 với xe du lịch
chạy trên đường tốt.
3.3.2. Xác định độ cứng và chuyển vị của phần tử đàn hồi
Các phần tử đàn hồi có thể ở dạng lò xo trụ,lò xo cụn,thanh xoắn.Trong mục này chỉ đề cập tới việc tính lực và chọn cách bố trí lò xo trụ.
Độ cứng và chuyển vị của lò xo
_Hình 3.8_
Hành trình làm việc:
flx = *cos*cos ;
Độ cứng theo trục tâm:
Clx = *;
Trong đó:
f = ft + fđ tổng hành trình làm việc của bánh xe.
Clx - độ cứng phần tử đàn hồi.
Flx - hành trình làm việc của lò xo.
- Độ cứng và hành trình giảm chấn
Kết cấu bố trí giảm chấn thường gặp như hình vẽ dưới đây.
Trục của giảm chấn không trùng với đường tâm trụ đứng thường gặp trên xe : ro (bán kính quay bánh xe dẫn hướng) và góc nghiêng ngang trụ đứng khá lớn.
- Hành trình làm việc:
fgc = * cos*cos ;
- Hệ số cản theo tâm trục:
Kgc=* .
_Hình 3.9_
3.3.3. Xác định các phản lực và lực tác dụng lên hệ treo cầu trước dẫn hướng:
a. Trường hợp chỉ có lực Z (vắng lực X,Y )
_Hình 3.10_
- Phản lực tại Z đặt tại bánh xe gây nên đối với trục đứng AB:
và mômen Mz(yoz).
- ZAB cân bằng với Zlx:
Zlx = Z.cosδ = = .cos100 = 4185 (N).
- Tại đầu A lực dọc theo phương giảm chấn tác dụng:
ZA = ZAB = Zlx = 4185 (N).
- Lực Z gây ra lực ngang ZY và mômen MZ:
ZY = Z.sinδ = .sin = .sin10o = 738 (N).
MZ = Z.ro.cosδ = . ro .cosδ = .cos10o.0.015 = 63 (N.m).
Trong đó:
Z - tải trọng thẳng đứng tác dụng lên một bánh xe,
Z = 0.5.G1 = 0.5.8500 = 4250 (N).
ro - là bán kính quay bánh xe quanh trụ đứng, 0,015(m)
ZAB - lực dọc theo phương trụ đứng.
ZY - lực ngang tác động lên bánh xe.
Δ - góc nghiêng ngang trụ đứng, δ = 10o.
Và có MZ tạo nên hai phản lực tại A và B là AMZ , BMZ
AMZ = BMZ = = = = 117 (N).
- Trong đó:
m = C2O2 = 462 (mm).
n = C1C2 =Kr/2 = 75 (mm).
rbx: bán kính bánh xe, 298 (mm).
- Còn ZY gây ra hai phản lực AZY và BZY:
..........
KẾT LUẬN
Sau thời gian làm đồ án, được sự hướng dẫn tận tình của thầy Đỗ Thành Phương cũng như sự giúp đỡ của các thầy giáo khác trong bộ môn, em đã hoàn thành những yêu cầu và nhiệm vụ của Đồ án tốt nghiệp.
Trong đồ án này em đã xây dựng được một phương pháp tính toán thiết kế cho hệ thống treo đảm bảo được những yêu cầu cơ bản như:
+ Tính êm dịu khi chuyển động.
+ An toàn với mọi chế độ tải.
+ Độ bền của các chi tiết cao.
+ Đảm bảo cho ôtô chạy trên những địa hình yêu cầu.
+ Các chi tiết có cấu tạo đơn giản, dễ gia công tháo lắp.
Ngoài ra trong đồ án này ngoài việc tính toán thiết kế hệ thống treo Mc.pherson, em còn tìm hiểu thêm về nhiều hệ thống treo khác , rút ra các ưu nhược điểm của từng loại và lựa chọn phương án thiết kế thích hợp nhất.
Bên cạnh những vấn đề đã giải quyết được vẫn còn những hạn chế như:
+ khả năng thay đổi độ cứng của hệ thống treo sao cho thích hợp với sự thay đổi của tải trọng.
+ khả năng thay đổi độ cao trọng tâm xe cho phù hợp với điều kiện địa hình.
Trong quá trình thực hiện đồ án không thể tránh khỏi những thiếu sót em mong các thầy giáo chỉ bảo để sửa chữa, rút kinh nghiệm để khi ra trường trở thành một kỹ sư có trình độ vững vàng hơn.
Một lần nữa em xin chân thành cảm ơn sự hướng dẫn tận tình của thầyvà sự hướng dẫntận tình của các thầy giáo khác trong bộ môn!
TÀI LIỆU THAM KHẢO
[1]. PGS. TS. Nguyễn Khắc Trai, Cấu tạo gầm xe con.
[2].TS.Nguyễn Hữu Cẩn - Trương Minh Chấp - Dương Đình Khuyến -Trần Khang - ĐHBK (1978), Giáo trình thiết kế tính toán ô tô máy kéo.
[3]. TS.Dương Đình Khuyến ĐHBK (1993), Ô tô máy kéo
[4]. Trịnh Chất - Lê văn Uyển ĐHBK (2000), Tính toán thiết kế hệ dẫn động cơ khí tập 1 và 2
[5].Lê Quang Minh - Nguyễn Văn Vượng, Sức bền vật liệu
[6].TS.Nguyễn Hữu Cẩn-PGS.TS Dư Quốc Thịnh- Phạm Minh Thái- Nguyễn Văn Tài- Lê Thị Vàng -ĐHBK_HN (1997), Lý thuyết ô tô
[7].Ninh Đức Tốn, Dung sai và tiêu chuẩn hoá.