Thử đánh giá sự phù hợp giữa máy chính vỏ và chân vịt, đối với một số trường hợp cụ thể
LỜI NÓI ĐẦU
Ngành tàu thuyền nước ta đóng vai trò hết sức quan trọng trong quá trình phát triển kinh tế của đất nước. Đặc biệt tàu thuyền đóng vai trò thiết yếu trong nền kinh tế biển, cụ thể là phục vụ cho việc khai thác, đánh bắt thuỷ hải sản. Đây là những ngành kinh tế được xem là mũi nhọn của đất nước trong giai đoạn hiện nay và cả trong tương lai.
Vì vậy có thể nói rằng, tàu thuyền là một phương tiện không thể thiếu trong cuộc xây dựng, phát triển của đất nước, nó không đơn thuần là phục vụ nhu cầu của con người, mà còn kích thích tạo đà thúc đẩy nền kinh tế phát triển.
Tuy nhiên trong hoạt động khai thác, một yêu cầu cần đòi hỏi là làm sao được sản lượng cao nhất trong khi chi phí thấp nhất. Để được điều này cần giải quyết từ khâu nghiên cứu, thiết kế, thi công và tổ chức khai thác.
Như chúng ta biết, đa số tàu cá của nước ta đều tàu vỏ gỗ. Việc đóng tàu đều dựa vào kinh nghiệm và thói quen. Do đó trong quá trình hoạt động, đánh bắt khai thác cá, sự phù hợp của liên hợp tàu hay máy chính vỏ tàu và chân vịt không còn được đảm bảo sự phù hợp như trong thiết kế. Điều này đã và đang là vấn đề đặt ra cho các nhà thiết kế và các nhà nghiên cứu nhiều vấn đề cần giải quyết, vì nó có ảnh hưởng rất lớn tới năng suất khai thác của người dân.
Bài toán đặt ra vấn đề cần giải quyết đó là tìm ra phương pháp, có thể đánh giá sự phù hợp của liên hợp tàu khi hoạt động thực tế. Nó cần đảm bảo được độ chính xác và sự đơn giản khi tiến hành đánh giá.
Sau một thời gian học tập và nghiên cứu về chuyên ngành của mình. Tôi được nhà trường giao cho thực hiện luận văn tốt nghiêp “Thử đánh giá sự phù hợp giữa máy chính vỏ và chân vịt, đối với một số trường hợp cụ thể”. Để đánh giá kết quả học tập sau khoá học, tập giải quyết những vấn đề cụ thể trong thực tế và trong sản xuất. Trong bài luận văn của mình, tôi xin trình bày phương pháp đánh giá sự phù hợp của liên hợp tàu, theo phương pháp xây dựng đồ thị vận hành khi tàu hoạt động trong thực tế.
Trong suốt thời gian thực hiện luận văn của mình, tôi được sự hướng dẫn tận tình của thầy giáo TS. Trần Gia Thái, cùng sự giúp đỡ của các thầy cô trong trường và các chú, các anh ở Sở thuỷ sản, Công ty Đóng tàu Sông Thuỷ và tất cả các bạn trong lớp đã giúp đỡ tôi. Để tôi có thể hoàn thành được luận văn của mình.
Qua đây tôi xin bày tỏ lòng biết ơn sâu sắc đến các quí thầy cô, các chú các cô. Đặc biệt là thầy TS. Trần Gia Thái đã hướng dẫn tận tình cho tôi thực hiện luận văn này.
Tôi xin chân thành cảm ơn!
Chương 1
ĐẶT VẤN ĐỀ
1.1. TỔNG QUAN
Như chúng ta đã biết, tàu thuỷ là một công trình kỹ thuật làm việc phức tạp, bao gồm ba bộ phận chính là động cơ chính, vỏ tàu và chân vịt được gọi chung là liên hợp tàu thủy. Các bộ phận này có quan hệ năng lượng rất chặt chẽ với nhau, trong đó chân vịt là bộ phận trung gian quan trọng, có nhiệm vụ nhận công suất động cơ phát ra, tạo thành lực đẩy P, khắc phục sức cản của môi trường R, để đẩy tàu chuyển động với tốc độ xác định V.
Vì vậy, việc đảm bảo sự làm việc phù hợp giữa các bộ phận máy - vỏ - chân vịt có vai trò và ý nghĩa quan trọng trong quá trình sử dụng tàu, là cơ sở để đảm bảo cho quá trình khai thác của tàu hiệu quả và an toàn nhất, có chi phí nhiên liệu là thấp nhất và vận tốc tàu đạt được là cao nhất.
Về mặt lí thuyết, sự làm việc phù hợp giữa các bộ phận trong liên hợp thường đã được người thiết kế đảm bảo khi tính toán tàu ở chế độ định mức (trên cơ sở phối hợp đường đặc tính của các bộ phận trong liên hợp trong đồ thị vận hành tàu), tương ứng với trường hợp động cơ mới, vỏ tàu và chân vịt sạch.
Tuy nhiên có thể nhận thấy, việc đảm bảo sự làm việc phù hợp theo tính toán lí thuyết như thế thực tế chỉ mang tính tương đối vì lí do có nhiều đường đặc tính, ví dụ như đường đặc tính vỏ tàu R = f(V), đều được tính gần đúng.
Mặt khác, sau thời gian khai thác, do điều kiện làm việc của các bộ phận trong liên hợp đều đã bị thay đổi, cụ thể như động cơ cũ đi, vỏ tàu và chân vịt đã bị bám bẩn, nên sự làm việc phù hợp của liên hợp của liên hợp sẽ bị phá vỡ và do đó sẽ làm ảnh hưởng lớn đến an toàn và hiệu quả khai thác của liên hợp tàu.
Vì thế vấn đề đánh giá sự làm việc phù hợp giữa các bộ phận trong liên hợp có vai trò và ý nghĩa quan trọng và hiện nay vẫn chưa được nghiên cứu giải quyết.
Đó là lí do để chúng tôi đề xuất đề tài này, để xây dựng một phương pháp mới để đánh giá mức độ phù hợp của tàu khi khai thác thực tế.
1.2. THỰC TRẠNG BÀI TOÁN ĐÁNH GIÁ SỰ PHÙ HỢP CỦA LIÊN HỢP TÀU
Như đã biết, đồ thị vận hành tàu là kết quả nhận được từ sự phối hợp giữa các bộ phận trong liên hợp tàu, nên đây chính là phương tiện phản ánh đầy đủ và chính xác tình hình hoạt động, chất lượng khai thác của các bộ phận trong liên hợp tàu. Chính vì vậy, hiện nay chúng ta thường dùng đồ thị vận hành để đánh giá sự phù hợp của liên hợp tàu. Tuy nhiên việc phân tích dựa trên đồ thị vận hành tàu truyền thống, chỉ đánh giá mối quan hệ của liên hợp ở chế độ thiết kế định mức, nên kết quả đánh giá sự phù hợp của liên hợp tàu là tàu hoạt động đảm bảo và phù hợp. Nhưng đồ thị vận hành lí thuyết không phản ánh được chính xác sự phù hợp của tàu ở điều kiện khai thác thực tế. Thực tế cho thấy qua hoạt động khai thác, sự phù hợp của liên hợp tàu đã bị thay đổi. Nhưng hiện nay các nhà nghiên cứu vẫn chưa tìm được phương pháp đánh giá mức độ phù hợp của liên hợp tàu trong thực tế.
Qua khảo sát thực tế chúng tôi thấy rằng, các chủ tàu hiện nay rất ít quan tâm hoặc không quan tâm đến vấn đề hoạt động phù hợp của liên hợp tàu. Do chưa có phương pháp nào để đánh giá sự hoạt động của liên hợp tàu, nên chưa xác định được chế độ làm việc hợp lí cho tàu, trong quá trình khai thác. Họ chỉ dựa vào những kinh nghiệm qua sử dụng tàu để điều khiển sao cho máy có công suất lớn nhất, để tàu có tốc độ và chế độ tải trọng lớn nhất, nên không đánh giá được mức độ phù hợp của liên hợp tàu khi hoạt động. Chính vì điều này đã dẫn đến máy bị dư công suất hoặc quá tải làm chi phí nhiên liệu tăng hiệu quả sử dụng thấp, chân vịt bị quá tải và có thể làm gãy chân vịt.
Hậu quả của việc sử dụng không đúng này đã dẫn đến sau một thời gian sử dụng tuổi thọ của liên hợp tàu sẽ bị giảm đi nhanh chóng, mà bộ phận quan trọng và chủ yếu nhất chính là máy. Nên đó cũng là một trong các lí do để giải thích tại sao liên hợp tàu có thời gian sử dụng ngắn.
Vì vậy đối với tàu đã hoạt động thực tế, cần phải đi đánh giá sự phù hợp của liên hợp tàu khi khai thác để xác định cho tàu chế độ làm việc hợp lí. Vấn đề đặt ra là cần tìm phương pháp để đánh giá sự phù hợp của liên tàu trong điều kiện thực tế. Với phương pháp này, có thể đánh giá quá trình hoạt động thực tế của liên hợp tàu một cách đơn giản và chính xác. Nên trong đề tài này chúng tôi xin trình bày một phương pháp mới, để có thể đánh giá chính xác mức độ phù hợp của liên hợp tàu trong điều kiện khai thác thực tế. Để giải quyết bài toán tìm chế độ hợp lí cho tàu khi khai thác.
1.3. MỤC TIÊU, ĐỐI TƯỢNG VÀ PHƯƠNG PHÁP NGHIÊN CỨU
Mục tiêu nghiên cứu: Xây dựng phương pháp để đánh giá sự phù hợp của liên hợp tàu trong điều kiện khai thác thực tế.
Đối tượng nghiên cứu: Tàu đánh cá vỏ gỗ.
Phương pháp nghiên cứu: Xây dựng đồ thị vận hành thực tế theo phương pháp mới. Dựa vào cặp thông số tốc độ tàu và số vòng quay chân vịt thực tế. Từ cặp thông số này biểu diễn đường đặc tính hoạt động chân vịt KT, KQ = f(J) truyền thống dưới dạng các đường KT, KQ = f(V,n) ở hệ toạ độ (V,n). Từ đây ta có thể xây dựng đồ thị vận hành thực tế. Qua đồ thị vận hành thực tế, ta đi so sánh với đồ thị vận hành lí thuyết để thấy được mức độ không phù hợp của tàu thực tế.
1.4. GIỚI HẠN NỘI DUNG ĐỀ TÀI.
Do thời gian thực hiện đề tài có hạn nên tôi chỉ tiến hành khảo sát thực tế trên một số tàu cụ thể để đưa vào tính toán.
Vì không có điều kiện đo tốc độ quay của chân vịt, nên tôi đo tốc độ quay của động cơ để lấy vào tốc độ chân vịt.
Để thực hiện đề tài này tôi dựa trên cơ sở những tài liệu đã được nghiên cứu và viết ra của thầy TS. Trần Gia Thái, tài liệu đã được quốc gia công nhận.
Các số liệu của tàu được ghi trong hồ sơ thiết kế được coi là số liệu chính xác để tôi thực hiện tính toán trong đề tài.
Chương 1: Đặt vấn đề
Chương 2: Cơ sở lí thuyết
Chương 3: Xây dựng đồ thị vận hành thực tế đối với một số tàu cụ thể.
Chương 4: Phân tích kết quả và thảo luận
Chương 2
CƠ SỞ LÍ THUYẾT VÀ PHƯƠNG PHÁP
XÂY DỰNG ĐỒ THỊ VẬN HÀNH THỰC TẾ
2.1. KHÁI QUÁT VỀ ĐỒ THỊ VẬN HÀNH TÀU.
2.1.1. Các đường đặc tính trên đồ thị vận hành.
Như chúng ta đã biết, sự phù hợp của các bộ phận trong liên hợp tàu khi hoạt động ở chế độ định mức được thể hiện trên đồ thị vận hành tàu với sự phối hợp của ba đường đặc tính chân vịt, đặc tính vỏ và đường đặc tính động cơ:
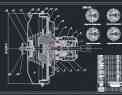
Đường đặc tính chân vịt thể hiện mối quan hệ năng lượng giữa công suất đòi hỏi của chân vịt NP và số vòng quay tương ứng của chân vịt ncv. Mục đích của việc xây dựng đường đặc tính chân vịt là để kiểm tra sự phù hợp giữa tổ hợp máy - vỏ - chân vịt.
Hình 2.1. Đường đặc tính chân vịt.
Đường đặc tính vỏ R = f(V) thể hiện mối quan hệ giữa sức cản vỏ với tốc độ tàu. Sức cản tàu được tính theo phương pháp gần đúng của viện thiết kế Lêningrad, phương pháp Oortsmersena, phương pháp Võ Văn Trác.
Hình 2.2. Đường cong sức cản vỏ tàu.
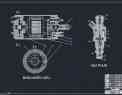
Đường đặc tính động cơ là các đường cong thể hiện mối quan hệ gữa các thông số chủ yếu đặc trưng cho chế độ làm việc của động cơ trong quá trình khai thác. Trong thực tế động cơ chính tàu thuỷ luôn làm việc trong điều kiện thay đổi nên các thông số kinh tế, kỹ thuật của động cơ sẽ thay đổi theo các đường đặc tính nên đường đặc tính động cơ thể hiện tương đối chính xác chất lượng khai thác của động cơ. Trên đồ thị vận hành của liên hợp tàu trong điều kiện thiết kế đường đặc tính động cơ được thể hiện là đường đặc tính ngoài công suất định mức động cơ (đường 4):
Đường đặc tính ngoài công suất định mức Ne = f(n) động cơ: Đặc tính tốc độ khi cơ cấu cung cấp nhiên liệu giữ ở công suất động cơ ra là công suất định mức, theo thiết kế NH tương ứng với số vòng quay định mức khi thiết kế nH (đường 4). Đặc tính ngoài định mức là đường đặc tính chính để xác định các thông số kinh tế, kỹ thuật của động cơ do nhà chế tạo quy định và đảm bảo ở điều kiện tiêu chuẩn, do đó khi nói đến đặc tính ngoài thì được hiểu là đường đặc tính ngoài định mức. Đường đặc tính ngoài công suất, thể hiện mối quan hệ giữa công suất phát ra với tốc độ quay của động cơ và đường lực kéo tương ứng ( hình 2.3 )
Hình 2.3. Các đường đặc tính của động cơ Diesel
Đặc tính ngoài công suất giới hạn (ha = max) động cơ: đặc tính tốc độ trong đó công suất động cơ ở mỗi chế độ vòng quay đạt giá trị giới hạn lớn nhất (đường 1)
Đặc ngoài giới hạn bơm cao áp động cơ: đặc tính tốc độ trong đó ở mỗi chế độ cơ cấu điều khiển nhiên liệu được kéo tới giới hạn trên của bơm cao áp (đường 2)
Đặc tính ngoài xả khói đen (100%< ha < hamax) động cơ: đặc tính tốc độ trong đó ứng với mỗi chế độ số vòng quay động cơ, cơ cấu điều khiển cung cấp nhiên liệu nằm ở vị trí bắt đầu xả khói đen trong khí xả (đường 3).
Đặc tính ngoài công suất sử dụng ( ha = 85 – 95%) động cơ: là đường đặc tính tốc độ trong đó cơ cấu cung cấp nhiên liệu được giữ ở vị trí công suất động cơ phát ra là công suất sử dụng NS ứng với số vòng quay chân là số vòng quay sử dụng nS (đường 5). Trong quá trình khai thác thực tế, để tránh sự quá tải cho động cơ thường tổ chức khai thác động cơ làm việc theo đặc tính ngoài công suất sử dụng nên đường đặc tính này được sử dụng để lực chọn các thiết bị động lực chính của tàu.
Đặc tính ngoài bộ phận ( ha < 85 – 95%): các đặc tính khi cơ cấu điều khiển cung cấp nhiên liệu được giữ ở vị trí công suất phát ra thấp đường đặc tính ngoài kể trên (đường 6).
2.1.2. Xây dựng đồ thị vận hành ở chế độ thiết kế.
Đặc tính vận hành là nhóm các đường cong biểu thị sự phối hợp làm việc giữa máy - vỏ - chân vịt. Nó bao gồm 2 phần được bố trí chung trên bản vẽ. Phần thứ nhất bao gồm các đường cong biểu diễn lực, phần thứ 2 bao gồm các đường cong biểu diễn công suất tương ứng. Ngoài ra còn có phần bổ sung biểu thị momen. Tất cả các đường cong đều phụ thuộc vào tốc độ tàu và số vòng quay của động cơ.
Đặc tính vận hành tàu là cơ sở để phân tích các chế độ làm việc của tổ hợp tàu ở các điều kiện khác nhau.
Đặc tính vận hành tàu chỉ có thể xây dựng được khi đã biết: các thông số cơ bản của chân vịt, của máy chính, đường cong sức cản của tàu hoặc công suất kéo phụ thuộc tốc độ tàu, các hệ số ảnh hưởng của thân tàu.
Sự làm việc phù hợp của liên hợp tàu chính là sự phù hợp về mặt năng lượng giữa các bộ phận trong liên hợp tàu, tức là khi máy phát ra công suất thì chân vịt có nhiệm vụ nhận hết công suất tạo thành lực đẩy P khắc phục sức cản của môi trường R, đẩy tàu chuyển động với tốc độ xác định V. Vì vậy cơ sở để xây dựng đặc tính vận hành là mối quan hệ giữa máy - vỏ - chân vịt, với các điều kiện sau:
1 - Số vòng quay của chân vịt ncv phải bằng số vòng quay của máy chính nđc(có chú ý đến hộp số)
2 – Tốc độ tiến của chân vịt VP (đối với nước yên tĩnh) phải bằng tốc độ tàu Vt.
3 - Lực đẩy do chân vịt tạo ra Pe bằng sức cản của tàu R ở tốc độ nhất định.
Dựa vào mối quan hệ trên và các số liệu khác đã biết, ta xác định các đặc trưng của chân vịt với thân tàu.
Để tính toán xây dựng đặc tính vận hành tàu, ta có thể viết lại các công thức lực đẩy chân vịt Pe, công suất động cơ Ne, tốc độ tàu V như sau:
Pe = KT , (KG)
Ne = , (ml)
V = , (hl/h)
hiệu suất tính đến mất mát năng lượng khi truyền từ động cơ đến chân vịt;
hệ số dòng theo và hệ số hút của liên hợp;
D - đường kính chân vịt, m;
KT, KQ - hệ số lực đẩy và hệ số momen được xác định theo công thức:
KT =
KQ =
Trong đó: n, D - lần lượt là số vòng quay chân vịt và đường kính chân vịt;
M - momen quay của chân vịt, KG.m;
P - lực đẩy chân vịt, KG;
J - hệ số tiến của chân vịt, được xác định theo công thức:
J =
V - tốc độ của tàu, (hl/h)
Khi xây dựng đồ thị vận hành người ta tính cho một loạt các giá trị hệ số tiến J từ J = 0 đến J = Jtt cho một loạt các số vòng quay không đổi từ ncvmin đến ncvđm (5 – 7 giá trị).
Từ đó ta dựng được đồ thị vận hành ứng với các giá trị số vòng quay chân vịt ncv không đổi.
- Xây dựng các đường đặc tính lực đẩy P = f(V) và công suất chân vịt N = f(V) theo các giá trị số vòng quay không đổi n = const (đường 1 và đường 1’).
- Vẽ các đường sức cản R = f(V) ở các chế độ tải trọng khác nhau (đường 2) trong hệ toạ độ lực và đường đặc tính công suất động cơ trong hệ toạ độ (N, n) (đường 3’).
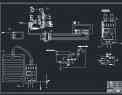
- Xây dựng đường công suất kéo EPS = f(V) (đường 2’) trong hệ toạ độ (N,V) và đường lực kéo của động cơ (đường 3) bằng phép chiếu đồ thị (hình 2-4)
Hình 2.4. Đồ thị vận hành tàu làm việc ở chế độ định mức.
1,1’- Đường đặc tính lực đẩy và công suất chân vịt theo các giá trị số vòng quay không đổi.
2, 2’ - Đường cong sức cản R = f(V) và công suất kéo EPS = f(V).
3, 3, - Đường lực kéo và đường đặc tính ngoài công suất định mức của động cơ.
Ta nhận thấy rằng đồ thị vận hành tàu là kết quả nhận được từ phối hợp làm giữa các bộ phận trong liên hợp tàu, nên đây chính là phương tiện phản ánh chính xác và đầy đủ tình hình hoạt động và chất lượng khai của các bộ phận trong liên hợp tàu ở các điều kiện khai thác thực tế khác nhau.
Do đó, nếu bằng cách nào đó có thể xây dựng đồ thị này thì có thể dùng nó để đánh giá quá trình làm việc của các bộ phận nói riêng và của cả liên hợp nói chung, cơ sở để giải quyết các bài toán vẫn còn đang tồn tại trong thực tế sử dụng tàu thuỷ hiện nay. Do ý nghĩa quan trọng của vấn đề nên phương này đã được nhiều nhà khoa học quan tâm nghiên cứu từ rất lâu, tuy nhiên do tính chất phức tạp của vấn đề nên kết quả vẫn còn rất hạn chế. Cho đến nay, phương pháp duy nhất để nhận được đồ thị vận hành tàu trong điều kiện thực tế là tổ chức khảo nghiệm quá trình hoạt động của các bộ phận liên hợp tàu trong điều kiện thực tế, ở tình trạng kỹ thuật thực tế của động cơ, cùng với bề mặt vỏ tàu và chân vịt đã bị ăn mòn bám bẩn.
Tuy nhiên việc tổ chức thực nghiệm như thế rất khó, đòi hỏi nhiều công sức và thiết bị tốn kém nên ít có khả năng thực hiện được, nhất là trong điều kiện khoa học kỹ thuật hiện nay. Chính vì thế, cần đặt vấn đề tìm kiếm phương hướng thực nghiệm khác với truyền thống, cho phép xác định đồ thị vận hành tàu trong điều kiện khai thác thực tế một cách đơn giản và khả thi hơn.
2.2. PHƯƠNG PHÁP XÂY DỰNG ĐỒ THỊ VẬN HÀNH THỰC TẾ.
2.2.1. Phương pháp hộp đen xác định đồ thị vận hành thực tế.
Về mặt lý thuyết, đồ thị vận hành tàu thể hiện mối quan cung - cầu về mặt năng lượng giữa các bộ phận trong liên hợp tàu, trong đó chân vịt là bộ phận tiếp nhận công suất do máy chính phát ra, tạo thành lực đẩy P, khắc phục sức cản R của vỏ tàu để đẩy tàu chuyển động với tốc độ xác định V. Do đó bằng cách nào đó, có thể xác định được đường đặc tính công suất chân vịt thực tế, kết hợp với đường đặc tính ngoài công suất định mức động cơ thực tế để suy ra đặc tính vỏ, thì về nguyên tắc có thể xây dựng được đồ thị vận hành tàu ở chế độ khai thác thực tế khác nhau. Điều này có nghĩa là có thể xem như tất cả sự thay đổi của đồ thị vận hành tàu sẽ được lưu lại bên trong hộp đen, mà kết quả nhận được ở đầu ra chính là đường đặc tính chân vịt thực tế, phản ánh đồng thời quá trình cung cấp và tiêu thụ năng lượng đang diễn ra giữa các bộ phận trong liên hợp tàu. Đến lượt mình đường đặc tính chân vịt thực tế nói trên lại sử dụng như một phương tiện để xây dựng đồ thị vận hành, nhằm thể hiện tình hình làm việc thực tế của các bộ phận có trong liên hợp tàu, do đó vấn đề đặt ra ở đây là phương pháp xác định đường đặc tính chân vịt trong điều kiện thực tế.
Phương pháp xác định đường đặc tính chân vịt thực tế, thì cho đến nay đường đặc tính chân vịt thường chỉ được xác định bằng phương pháp duy nhất là tổ chức khảo nghiệm quá trình hoạt động của toàn bộ liên hợp tàu trong điều kiện khai thác thực tế. Tuy nhiên, phương pháp xác định đường đặc tính hoạt động chân vịt thực tế như thế không đơn giản, vì phải tổ chức khảo nghiệm ở nhiều chế độ làm việc để phối hợp tốc độ tàu với tốc độ quay chân vịt, tuy nhiên khó khăn này đã được khắc phục hoàn toàn nhờ các kết quả nghiên cứu về phương pháp biểu diễn mới đường đặc tính hoạt động chân vịt KT, KQ = f(J) truyền thống dưới dạng các đường KT, KQ = f(V,n) ở hệ toạ độ (V,n), tạm gọi là đường đặc tính hoạt động chân vịt chi tiết. Phương pháp biểu diễn mới này không chỉ cho phép xác định đường đặc tính hoạt chi của chân vịt một cách đơn giản và chính xác, từ cặp các giá trị tốc độ chạy tàu V và tốc độ quay chân vịt n, mà còn có đặc điểm quan trọng là đường đặc tính hoạt động chi tiết của chân vịt sạch và chân vịt bẩn tương ứng đều là chùm các đường thẳng đồng quy tại gốc toạ độ (V,n) và nằm trùng khít lên nhau. Chính nhờ đặc điểm này đã hình thành nên phương pháp xác định đường đặc tính vận hành tàu, trong điều kiện thực tế từ thông số đầu vào là cặp các giá trị tốc độ chạy tàu và tốc độ quay chân vịt (V,n), các thông số có thể xác định đơn giản và thuận tiện trong điều kiện chạy tàu thực tế.
Như vậy, theo phương pháp này thì tất cả yếu tố ảnh hưởng đến quá trình làm việc liên hợp ở điều kiện khai thác thực tế đều được giữ lại trong hộp đen, với thông tin ở đầu ra của hộp đen là cặp giá trị tốc độ tàu V và tốc độ quay chân vịt n. Cơ sở để xây dựng đường đặc tính hoạt động chi tiết và đồ thị vận hành tàu nhằm phản ánh sự phối hợp hoạt động thực tế giữa các bộ phận trong liên hợp tàu. Khi đó, bằng cách xác định và so sánh đồ thị vận hành tàu ở chế độ làm việc định mức khi thiết kế, tương ứng trường hợp động cơ ở trạng thái kỹ thuật tiêu chuẩn, cùng với vỏ tàu và chân vịt đều sạch và ở điều kiện thực tế, tương ứng tình trạng kỹ thuật động cơ đã bị xấu đi, cùng với vỏ tàu và chân vịt đã bị bám bẩn, có thể giải quyết bài toán trong đề tài nói riêng và trong thực tế sử dụng tàu nói chung.
Như vậy để xây dựng được đồ thị vận hành thực tế, ta cần đi xây dựng được đường đặc tính chân vịt thực tế, theo cặp thông số đầu vào là tốc độ tàu chạy thực tế và tốc độ quay chân vịt.
2.2.2. Phương pháp xác định đường đặc tính chân vịt thực tế.
Ta đã biết, nếu như đường đặc tính chân vịt thể hiện quá trình làm việc của chân vịt làm việc độc lập, thì quá trình làm việc của chân vịt trong mối quan hệ năng lượng với các bộ phận trong liên hợp tàu lại được thể hiện theo đường đặc tính công suất của chân vịt NP = f(n), hay gọi đơn giản là đường đặc tính chân vịt, tức là đồ thị biểu diễn mối quan hệ giữa công suất đòi hỏi NP (ml) với tốc độ quay n (s-1) của chân vịt theo công suất tổng quát đã biết:
NP = 2nM = 2 (2.6)
Hoặc:
NP = Cn3 (2.7)
với C = 2 (2.8)
Trong đó KQ là hệ số mômen của chân vịt, xác định theo công thức :
KQ= (2.9)
Như vậy, để có thể đánh giá quá trình làm việc của chân vịt nói riêng và của liên hợp nói chung cần đặt vấn đề xây dựng đường đặc tính công suất chân vịt trong điều kiện khai thác thực tế. Từ công thức (2.6) nhận thấy, để xác định đường đặc tính công suất chân vịt trong điều kiện thực tế, cần xác định giá trị hệ số C theo công thức (2.8) hoặc giá trị hệ số mômen KQ theo công thức (2.9), với giá trị KQ được xác định theo đường đặc tính hoạt động của chân vịt. Cho đến nay đường đặc tính hoạt động của chân vịt được xác định chỉ bằng cách duy nhất là thử nghiệm các mô hình chân vịt trong bể thử, ở chế độ làm việc có giá trị hệ số tiến J khác nhau, tương ứng với sự phối hợp giữa các giá trị tốc độ tính tiến VP và tốc độ quay n của chân vịt mô hình.
Do đó đường đặc tính chân vịt hoạt động thực tế nói trên cũng được xác định bằng cách duy nhất là tổ chức khảo nghiệm quá trình hoạt động, của toàn bộ liên hợp tàu trong điều khai thác thực tế. Như vậy, nếu có đầy đủ số liệu về công suất động cơ N, tốc độ tàu V và tốc độ quay của chân vịt n, có thể xây dựng đường đặc tính chân vịt nói riêng và đồ thị vận hành nói chung ở điều kiện đó.
Tuy nhiên phương pháp xác định đường đặc tính hoạt động chân vịt thực tế như thế không đơn giản, vì nếu thử nghiệm mô hình trong bể thử, nơi có thể chủ động thay đổi tốc độ tính tiến và tốc độ quay nhằm tạo ra các chế độ làm việc, ứng với giá trị các hệ số tiến chân vịt J tính theo công thức đã cho, thì để xác định đường đặc tính hoạt động chân vịt trong điều kiện khai thác thực tế khác nhau, cần tổ chức khảo nghiệm ở nhiều điều kiện mới có thể phối hợp tốc độ tàu với tốc độ quay của chân vịt, nhằm tạo các chế làm việc khác nhau của liên hợp tàu, tương ứng hệ số tiến J cho trước.
Rõ ràng việc đáp ứng được yêu cầu nói trên trong điều kiện chạy tàu thực tế không đơn giản, thậm chí không thực hiện đựơc, nhất là trong điều kiện kỹ thuật còn hạn chế của nước ta hiện nay.Vì lẽ đó nên mặc dù phương pháp truyền thống tuy vẫn cho phép xác định đường đặc tính hoạt động thực tế nhưng chủ yếu vẫn chỉ thực hiện trong bể thử mô hình tàu hoặc trong ống khí động mà chưa áp dụng rộng rãi, do đó cần tìm phương pháp mới, đơn giản và thuận lợi hơn. Vấn đề đặt ra ở đây là cần có giải pháp khắc phục những khó khăn gặp phải trong viêc tổ chức thực nghiệm xác định đường đặc tính thực nghiệm thực tế của chân vịt. Nhất là việc phối hợp tốc độ chạy tàu và tốc độ quay chân vịt để đạt giá trị hệ số tiến J đã cho trước.
Về mặt toán học nhận thấy rằng, do hệ số tiến J được xác định từ cặp giá trị tốc độ tàu V và tốc độ quay chân vịt n nên có thể chủ động tính trực tiếp quan hệ giữa giá trị hệ số mômen KQ từ công thức (2.9) theo cặp trị tốc độ tàu V và tốc độ quay chân vịt n khác nhau, và biểu diễn giá trị KQ đã tính dưới dạng các đường KQ = const trong hệ toạ độ (V,n), tạm gọi là đường đặc tính hoạt động chi tiết.
Như vậy, mặc dù vẫn được suy ra từ đường đặc tính hoạt động nhưng việc xây dựng đường đặc tính hoạt động chi tiết, nhất là đối với chân vịt thực tế lại đơn giản hơn nhiều và quan trong nhất là có thể thực hiện trong điều kiện chạy tàu vì không cần khảo nghiệm ở nhiều chế độ làm việc mới đạt được chế độ hệ số tiến chân vịt đã cho, đồng thời các đại lượng cần thiết như công suất động cơ N, tốc độ tàu V, tốc độ quay chân vịt n đều có thể xác định ở điều kiện chạy tàu thực tế nhờ thiết bị đo. Mặt khác cũng từ công thức (2.9) có thể nhận thấy mối quan hệ toán học giữa hệ số tiến J của chân vịt với tốc độ tàu V và tốc độ quay chân vịt n có thể biểu diễn theo công thức:
V = (JD)n (2.10)
Biểu thức trên chứng tỏ, ở chế độ làm việc của liên hợp tàu đang xét, với giá trị hệ số tiến chân vịt J và tương ứng là giá trị hệ số mômen của chân vịt KQ không đổi, mối quan hệ giữa tốc độ chạy tau V và tốc độ quay chân vịt n là mối quan hệ tuyến tính, tức là đường hoạt động chi tiết của châ vịt dưới dạng các đường KQ = const trong hệ toạ độ (V,n) là chùm đường thẳng đi qua gốc toạ độ O, với hệ số góc k xác định theo biểu thức:
K = (2.11)
Trong đó (V,n) là cặp giá trị tốc độ tàu và tốc độ quay của chân vịt ở chế độ chân vịt đang xét.
Hình a) là mối quan hệ và cách tính chuyển đường đặc tính hoạt động truyền thống KQ = f(J) sang đường đặc tính hoạt động chi tiết tương ứng của chân vịt, dưới dạng các đường KQ = f(V,n).
Như vậy, ý tưởng dùng đường đặc tính hoạt động chi tiết thay cho đường đặc tính chân vịt hoạt động truyền thống trong việc tính giá trị hệ số mômen chân vịt KQ ở điều kiện khai thác thực tế, không chỉ làm cho việc thực nghiệm đơn giản và thi hơn nhiều mà còn giảm đáng kể khối lượng công việc và tăng độ chính xác nhiều lần vì lúc này chỉ cần tổ chức khảo nghiệm ở mỗi một chế độ làm việc là có thể xác định đường đặc tính hoạt động chân vịt chi tiết ở điều kiện thực tế đang xét.
.
Hình 2.5. Đường đặc tính hoạt động và đường đặc tính hoạt động chi tiết
Điều quan trọng hơn là khả năng hoàn toàn có thể tổ chức thực nghiệm trong thực tế, vì các đại lượng được nói ở đây đều có thể xác định một cách dễ dàng ngay trong quá trình sử dụng và khai thác hợp liên hợp.
Tuy nhiên khó khăn lớn nhất là việc xác định giá trị công suất động cơ thực tế đang lắp trên tàu tuy vẫn có thể thực hiện được nhờ sử dụng thiết bị đo công suất cầm tay nhưng cũng không đơn giản, do đó cần có giải pháp khả thi và cụ thể hơn về công suất thực tế động cơ.
2.2.3. Kết quả nghiên cứu về đường đặc tính chân vịt thực tế của động cơ. Ta biết rằng, đường đặc tính hoạt động của các chân vịt mô hình thử nghiệm ở trạng thái chân vịt sạch thường đã được tổng hợp lại trên các đồ thị chung để dùng trong tính toán, thiết kế chân vịt tàu thuỷ, do đó về nguyên tắc có thể lợi dụng kết quả nhận được từ các đồ thị tổng hợp như thế để xây dựng đường đặc tính hoạt động chi tiết chân vịt sạch và chân vịt bẩn một đơn giản và chính xác mà không cần phải tổ chức khảo nghiệm quá trình hoạt động liên hợp ở các chế độ khác nhau.
Chính vì thế, ta đi tiến hành xác định và so sánh hai hệ thống các đường đặc tính hoạt động chi tiết của chân vịt ở trạng thái sạch ban đầu và trạng thái bẩn thực tế, đối với một số tàu cụ thể nhằm mục đích tìm kiếm mối quan hệ toán học giữa hai hệ thống đường đặc tính hoạt động chi tiết để tìm phương pháp xác định đường đặc tính hoạt động chi tiết bẩn đơn giản và thuận lợi hơn từ đường đặc tính hoạt động chi tiết của chân vịt sạch tương ứng với nó. Về mặt phương pháp luận, mối quan hệ toán học như thế hoàn toàn có thể tìm được vì hai hệ thống đường đặc tính chi tiết của chân vịt sạch và bẩn đều là những đường thẳng đồng quy tại gốc toạ độ (V,n), và trùng khít lên nhau. Điều lưu ý là sự trùng nhau nói trên không có nghĩa là hệ số mômen KQ của chân vịt không đổi, khi chân vịt chuyển từ bề mặt sạch sang bề mặt thực tế, mà có nghĩa là tại cặp giá trị tốc độ tàu V và tốc độ quay chân vịt n của liên hợp trong điều kiện thực tế. Chân vịt thực của tàu nhận giá trị hệ số mômen KQ bằng giá trị KQ của chân vịt sạch, nhưng xác định tại giá trị hệ số tiến chân vịt J đang xét, tương ứng cặp giá trị tốc độ V và tốc độ chân vịt n của liên hợp tàu ở điều kiện thực tế.
Nói cách khác, trong điều kiện thực tế, do động cơ trên tàu đã cũ, cùng với chân vịt và vỏ tàu đã bẩn nên cặp giá trị tốc độ V va tốc độ quay chân vịt n của liên hợp tàu sẽ bị thay đổi so với thiết kế, đã làm cho giá trị hệ số KQ của giá trị thực tế trong liên hợp tàu thay đổi so với chân vịt sạch tương ứng, tuy nhiên có thể tìm thấy giá trị này theo đặc tính hoạt động của chi tiết chân vịt sạch tương ứng,từ cặp giá trị tốc độ tàu mới V và tốc độ quay của chân vịt n trong liên hợp tàu trong điều kiện thực tế (hình 2.6).
Hình 2.6. Xác định giá trị hệ số KQ của chân vịt thực tế theo đường đặc tính chân sạch tương ứng.
Giả sử ban đầu liên hợp tàu thuỷ đang xét hoạt động ở chế độ làm việc định mức khi thiết kế, với giá trị hệ số mômen KQH được xác định theo đường đặc tính hoạt động chi tiết của chân vịt sạch, tương ứng cặp giá trị tốc độ tàu và chế độ quay ở chế độ định mức của chân vịt (VH,nH). Còn ở chế độ làm việc thực tế khác, với chế độ làm việc định mức do ảnh hưởng của yếu tố sử dụng nên tốc độ chuyển động của tàu và tốc độ quay của chân vịt bị thay đổi đến các giá trị mới (V,n), tương ứng với giá trị hệ số tiến biểu kiến Jt của chân vịt nằm trong liên hợp tàu. Khi đó giá trị hệ số momen KQ của chân vịt bẩn bị thay đổi đến giá trị KQt có giá trị đúng bằng giá trị xác định theo đường đặc tính hoạt động chi tiết của chân vịt mô hình hay chân vịt sạch tương ứng, ở cùng giá trị hệ số tiến của chân vịt J đã trình bày.
Như vậy, nếu muốn giữ nguyên tốc độ tàu như ở chế độ tàu định mức VH thì buộc phải tăng tốc độ quay chân vịt từ giá trị n1 đến giá trị n2, tương ứng với giá trị hệ số mômen KQt của chân vịt bẩn trong điều kiện khai thác thực tế đang xét. Còn nếu như giữ nguyên tốc độ quay của chân vịt như tốc độ quay ở chế độ làm việc định mức nH thì tốc độ tàu sẽ bị giảm đến giá trị V2 so với tốc độ tàu ở chế độ làm việc định mức VH.
Chính nhờ đặc điểm rất quan trọng này mà việc tổ chức thực nghiệm xác định đường đặc tính hoạt động chi tiết chân vịt nói chung giá trị hệ số mômen KQ nói riêng, trở nên đơn giản hơn nhiều, lúc này không cần phải xác định công suất động cơ mà chỉ cần xác định cặp các giá trị tốc độ tàu, và tốc độ quay chân vịt là hoàn toàn có thể xác định được giá trị hệ số mômen KQ của chân vịt thực tế.
Tiến hành tương tự cho hệ số lực đẩy KT cũng sẽ nhận được kết quả như đối với hệ số mômen, cụ thể như sau:
- Đường đặc tính hoạt động chi tiết của chân vịt biểu diễn dưới dạng các đường KT = (V,n) thể hiện mối quan hệ giữa giá trị lực đẩy KT với cặp các giá trị tốc độ tàu V và tốc độ quay chân vịt n trong hệ toạ độ (V,n) cũng là các đường thẳng đồng quy tại gốc toạ độ O
-Đường đặc tính hoạt động chi tiết dưới dạng các đường K1= f(V,n) của các chân vịt sạch, xác định từ các đồ thị tổng hợp các đường hoạt động chân vịt như đồ thị Papmen, trùng với các đường đặc tính hoạt động chi tiết của chân vịt trong liên hợp bẩn tương ứng, trong đó giá trị hệ số lực đẩy KT thực tế sẽ được xác định từ số liệu chạy thử tàu ở điều kiện đang xét theo công thức tổng quát:
KT= (2.12)
2.2.4. Xây dựng đồ thị vận hành tàu thực tế.
2.2.4.1. Xây dựng đường đặc tính chân hoạt động chi tiết của chân vịt sạch
- Lựa chọn đồ thị thiết kế chân vịt tổng hợp các đường đặc tính hoạt động phù hợp với chân vịt đang tính để xác định mối quan hệ giữa các thông số KT, KQ= f(J). Hình dưới đây là cách thức xác định mối quan hệ KT, KQ = f(J) theo đồ thị thiết kế chân vịt của Papmen:
Hình 2.7. Xác định mối quan hệ KT, KQ = f(J) theo đồ thị Papmen
- Từ các số liệu xác định từ mối quan hệ đồ thị KT, KQ = f(J) đã được trình bày trong phần trên, tính và xây dựng đường đặc tính hoạt động chi tiết chân vịt KT, KQ = f(V,n) là các đường thẳng qua gốc toạ độ dưới dạng các đường KT, KQ = const trong hệ toạ độ (V,n). Ví dụ ở bảng dưới đây là bảng tính và xây dựng đường đặc tính hoạt động chi tiết của chân vịt sạch theo đồ thị Papmen.
- Do đường đặc tính hoạt động chi tiết của chân vịt sạch và chân vịt bẩn trùng nhau, nên từ cặp giá trị tốc độ tàu V và tốc độ quay chân vịt n ở điều kiện khai thác thực tế, có tính giá trị các hệ số KT, KQ của chân vịt bẩn, trong các chế độ tải trọng khác nhau dựa theo các đường đặc tính hoạt động chi tiết KT, KQ = f(V,n) của chân vịt sạch tương ứng đã xây dựng được trong phần trên.
Bảng tính và xây dựng đường đặc tính hoạt động chi tiết của chân vịt sạch
|
Giá trị hệ số mômenKQ (hoặc KT) |
Giá trị hệ số tiến J theo KQ (hoặc KT) |
Tốc độ quay chân vịt n (v/s) |
Tốc độ tàu Vt = (nD)J (m/s) |
|
KQ1 |
J1 |
n11 n21 … nn1 |
VP11 VP21 … VPn1 |
|
KQ2 |
J2 |
n12 n22 … nn2 |
VP12 VP22 … VPn2 |
|
… |
… |
… |
… |
|
KQn |
Jn |
n1n n2n … nnn |
VP1n VP2n … VPnn |
2.2.4.2. Xây dựng đường đặc tính chân vịt của động cơ ở điều kiện khai thác thực tế
- Do đường đặc tính hoạt động chân vịt của động cơ NP = f(n), tức là đồ thị biểu diễn mối quan hệ giữa công suất đòi hỏi NP (ml) với tốc độ quay n (s-1) của chân vịt được xác định theo công thức:
NP = Cn3 (2.13)
với C = (2.14)
Trong đó: KQ là hệ số mômen của chân vịt, xác định theo công thức:
KQ = (2.15)
Trong đó:
M – mômen quay chân vịt (KG.m)
n - tốc độ quay chân vịt (v/s)
D - đường kính chân vịt (m)
khối lượng riêng của nước biển (KG.s2/m4)
Từ các công thức trên có thể tóm tắt trình tự xác định chân vịt theo trình tự:
- Từ giá trị hệ số mômen KQ đã xác định trong phần trên, tính giá trị C theo công thức (2.14) và xây dựng đường đặc tính chân vịt thực tế của động cơ ở các chế độ tải trọng khác nhau trong hệ toạ độ công suất - tốc độ quay dưới dạng đường cong bậc ba theo công thức (2.13).
- Từ giá trị hệ số KQ, KT đã xác định, có thể xác định công suất phát ra của động cơ và lực đẩy chân vịt ở chế độ làm việc đang xét, cơ sở để xây dựng đường đặc tính chân vịt trên đồ thị vận hành.
2.2.4.3. Xây dựng đồ thị vận hành tàu trong điều kiện khai thác thực tế
Xây dựng một hệ toạ độ tổng hợp gồm bốn phần khác nhau, trong đó phần phía trên bên trái là hệ toạ độ công suất - tốc độ quay (N, n), phần phía trên bên phải là hệ toạ độ công suất - tốc độ (N,V). Phần phía dưới bên trái là hệ toạ độ lực - tốc độ quay (P,n) và phần phía dưới bên phải là hệ toạ độ lực - tốc độ (N,V)
(hình )
- Xây dựng trong hệ toạ độ công suất - tốc độ quay (N,n) các đường đặc tính chân vịt N = f(n) (đường 1’’) ở chế độ khai thác khác nhau theo công thức:
NP = Cn3
với C =
- Xác định giá trị công suất yêu cầu của chân vịt từ công thức (2.15) theo giá trị hệ số mômen KQ tương ứng với tốc độ quay chân vịt n, trong liên hợp tàu ở các chế độ tải trọng khác nhau, cơ sở để xây dựng đường đặc tính công suất thực tế thể hiện mối quan hệ giữa công suất và tốc độ quay của động cơ trong liên hợp tàu đang xét (đường 3)
- Từ mối quan hệ giữa các đại lượng công suất N, vận tốc tàu V và tốc độ quay chân vịt n, dựng trên hệ toạ độ công suất - vận tốc đường công suất kéo có ích EPS = f(V) ở các chế độ tải trọng khác nhau (đường 2), tương ứng với đường đặc tính chân vịt 1’’.
- Từ cặp các giá trị vận tốc tàu và tốc độ quay chân vịt ở điều kiện khai thác liên hợp đang xét, xác định theo các đường đặc tính hoạt động chi tiết của chân vịt sạch KT = f(V,n), đã xây dựng giá trị hệ số lực đẩy KT của chân vịt bẩn ở điều kiện khai thác thực tế đang xét.
- Từ giá trị hệ số lực đẩy KT của chân vịt đã được xác định, tính công suất thực tế động cơ Ne, lực đẩy chân vịt P và sức cản vỏ tàu R ở điều kiện làm việc đang xét, phụ thuộc vận tốc tàu V theo các công thức đã biết:
P = KT (2.16)
Ne = (2.17)
- Từ các kết quả tính lực đẩy chân vịt P và sức cản tàu R tính ở trên, xây dựng trên hệ toạ độ lực - vận tốc ở phần dưới của đồ thị vận hành tàu, đường cong sức cản R = f(V) (đường 2’) ở các chế độ tải trọng khác nhau. Cũng có thể xây dựng các đường cong này từ các đường công suất kéo 2 nhờ phương pháp chiếu đồ thị truyền thống như đã biết.
Quá trình đồ thị vận hành thực tế theo đường đặc tính hoạt động chi tiết của chân vịt được trình bày như dưới bảng sau:
Bảng tính đồ thị vận hành tàu thực tế theo đường đặc tính hoạt động chi tiết
|
TT |
Các đại lượng và công thức tính |
Đơn vị |
Giá trị các đại lượng cần tính |
||
|
nmin |
… |
nmax |
|||
|
1 |
Tốc độ quay chân vịt n |
v/p |
|
|
|
|
2 |
Tốc độ chạy tàu V |
hl/h |
|
|
|
|
3 |
Giá trị hệ số mômen KQ = f(V,n) |
_ |
|
|
|
|
4 |
Giá trị hệ số lực đẩy KT = f(V,n) |
_ |
|
|
|
|
5 |
|
|
|
|
|
|
6 |
|
|
|
|
|
|
7 |
V = (4)J1 |
hl/h |
|
|
|
|
8 |
P = (5)KT |
KG |
|
|
|
|
9 |
Ne= |
ml |
|
|
|
|
7 |
Vt = (4)J2 |
hl/h |
|
|
|
|
8 |
P = (5)KT |
KG |
|
|
|
|
9 |
Ne= |
ml |
|
|
|
|
|
|
|
|
|
|
|
7 |
Vt = (4)Jn |
hl/h |
|
|
|
|
8 |
P = (5)KT |
KG |
|
|
|
|
9 |
Ne= |
ml |
|
|
|
Hình 2.8. Phương pháp xây dựng đồ thị vận hành tàu trong điều kiện khai thực tế
1, 1’ - Đường đặc tính công suất chân vịt và lực đẩy theo tốc độ quay không đổi n = const.
2, 2’ – Đường công suất kéo EPS = f(V) và đường cong sức cản R = f(V).
3, 3’ - Đường đặc tính công suất động cơ và lực kéo theo tốc độ quay n.
4, 4’ - Đường đặc tính công suất chân vịt N = f(n).
Hình 2.9. Sơ đồ thuật toán của chương trình xác định đồ thị vận hành.
Chương 3
XÂY DỰNG ĐỒ THỊ VẬN HÀNH TÀU ĐỐI VỚI TÀU CỤ THỂ
3.1. XÂY DỰNG ĐỒ THỊ VẬN HÀNH TÀU THỰC TẾ VỚI TÀU KH - 91806
3.1.1 Các thông số về tàu và các thông tin chuẩn bị khi thử tàu.
3.1.1.1. Các thông số cơ bản về tàu
Các thông số bản tàu KH – 91806TS
- Chiều dài toàn bộ Ltb = 18,4 m; - Chiều dài thiết kế: Ltk = 16,8 m
- Chiều dài lớn nhất Lmax =18,0 m; - Chiều rộng thiết kế: BTK=4,79 m
- Chiều rộng lớn nhất: Bmax =5,1 m; Chiều cao mạn:H = 2,53m
- Chiều chìm trung bình: Ttb = 1,85 m; Các hệ số đầy
- Hệ số Hệ số dòng theo
- Hệ số dòng hút: t = 0,217 Máy chính: KUBOTA - Nhật bản
công suất máy chính Ne = 160 ML
- Tỉ số truyền hộp giảm tốc: I = 2,9 Số cánh chân vịt z = 3
- Tỉ số mặt đĩa: = 0,5; Đường kính chân vịt D = 1,25 (m)
- Tỉ số bước xoắn: H/D = 0,54 Mật độ mặn: = 104,5 (KG.s2/m2)
- Hiệu suất hộp giảm tốc: Hiệu suất đường trục:=0,97
3.1.1.2. Các thông tin chuẩn bị thử tàu
- Ngày thử tàu: 24 – 4 - 2007
- Nơi thử tàu: CÔNG TY ĐÓNG TÀU SÔNG THỦY
- Độ sâu: 4m.
- Rộng nơi thử: 24m.
- Độ ẩm không khí:85%
- Nhiệt độ môi trường: 350C
- Vận tốc gió:cấp 2.
- Vận tốc dòng chảy bằng 0 (thử khi nước tĩnh).
- Vận tốc tàu đo bằng máy định vị tàu loại Furuno 320 (NHẬT sản xuất) độ chính xác là 0,1%
- Vòng quay chân vịt đo bằng thiết bị điện tử cầm tay loại CDT có độ chính xác 0,02%.
- Số vòng quay chân vịt lớn nhất khi mang tải nmax =383 v/ph.
- Số vòng quay chân vịt nhỏ nhất khi mang tải nmin= 90 v/ph.
- Xây dựng đồ thị vận hành ở ba chế độ tải trọng 100%, 110%, 85% tải.
Bảng giá trị tốc độ đo trên tàu thực tế.
|
chế độ tải trọng |
Đại lượng |
Đơn vị |
nmin |
nS |
nH |
nmax |
|
ncv |
v/ph |
224 |
335 |
372 |
383 |
|
|
110% tải |
V |
hl/h |
3,2 |
5,2 |
5,7 |
5,9 |
|
100% tải |
V |
hl/h |
3,4 |
5,4 |
5,8 |
6,2 |
|
85% tải |
V |
hl/h |
3,6 |
5,7 |
6,4 |
6,8 |
Từ trình bày lí thuyết ở trên và những số liệu thu sau khi khảo sát được, tiến hành xây dựng đồ thị vận hành thực tế theo các bước sau:
- Xây dựng đường đường đặc tính chi tiết chân vịt sạch KT, KQ = f(V,n).
- Xây dựng đường đặc tính chi tiết chân vịt của động cơ cho ba chế độ tải với vận tốc tàu V và số vong quay chân vịt thực tế.
- Tính và xây dựng đường công suất động cơ và lực đẩy chân vịt ở ba chế độ tải trọng.
- Biểu thị các đường đã tính lên đồ thị vận hành.
- Xây dựng đường công suất kéo EPS và đường sức cản bằng phép chiếu đồ thị.
3.1.2. Xây dựng đường đặc tính chân vịt sạch tàu KH – 91806TS.
Xây dựng đường đặc tính chân vịt chi tiết KQ = f(V,n).
Dưới đây là bảng tính xây dựng đường đặc tính chân vịt sach.
|
KQ |
J |
ncv(v/p) |
Tốc độ tàu Vt=(nD)J(hl/h) |
|
0,008 |
0,42 |
276 |
4,69 |
|
0,008 |
0,42 |
300 |
5,1 |
|
0,008 |
0,42 |
336 |
5,71 |
|
0,008 |
0,42 |
366 |
6,22 |
|
0,008 |
0,42 |
414 |
7,038 |
|
0,01 |
0,4 |
276 |
4,47 |
|
0,01 |
0,4 |
300 |
4,86 |
|
0,01 |
0,4 |
336 |
5,44 |
|
0,01 |
0,4 |
366 |
5,93 |
|
0,01 |
0,4 |
414 |
6,7 |
|
0,012 |
0,36 |
276 |
4,02 |
|
0,012 |
0,36 |
300 |
4,37 |
|
0,012 |
0,36 |
336 |
4,89 |
|
0,012 |
0,36 |
366 |
5,33 |
|
0,012 |
0,36 |
414 |
6,03 |
|
0,014 |
0,26 |
276 |
2,9 |
|
0,014 |
0,26 |
300 |
3,15 |
|
0,014 |
0,26 |
336 |
3,53 |
|
0,014 |
0,26 |
366 |
3,85 |
|
0,014 |
0,26 |
414 |
4,36 |
|
0,016 |
0,13 |
276 |
1,45 |
|
0,016 |
0,13 |
300 |
1,58 |
|
0,016 |
0,13 |
336 |
1,77 |
|
0,016 |
0,13 |
366 |
1,93 |
|
0,016 |
0,13 |
414 |
2,18 |
Hình 3.1. Đồ thị đặc tính hoạt động chi tiết chân vịt sạch theo KQ
Xây dựng đặc tính chân vịt chi tiết KT = f(V,n) trên là hệ toạ độ tốc độ chân vịt n và tốc độ tàu V.
|
KT |
J |
ncv (v/ph) |
Tốc độ chạy tàu Vt = (nD)J (m/ph) |
|
0,08 |
0,4 |
276 |
4,47 |
|
0,08 |
0,4 |
300 |
4,86 |
|
0,08 |
0,4 |
336 |
5,44 |
|
0,08 |
0,4 |
366 |
5,93 |
|
0,08 |
0,4 |
414 |
6,7 |
|
0,1 |
0,37 |
276 |
4,13 |
|
0,1 |
0,37 |
300 |
4,49 |
|
0,1 |
0,37 |
336 |
5,03 |
|
0,1 |
0,37 |
366 |
5,48 |
|
0,1 |
0,37 |
414 |
6,2 |
|
0,12 |
0,31 |
276 |
3,46 |
|
0,12 |
0,31 |
300 |
3,76 |
|
0,12 |
0,31 |
336 |
4,22 |
|
0,12 |
0,31 |
366 |
4,59 |
|
0,12 |
0,31 |
414 |
5,2 |
|
0,14 |
0,24 |
276 |
2,68 |
|
0,14 |
0,24 |
300 |
2,91 |
|
0,14 |
0,24 |
336 |
3,26 |
|
0,14 |
0,24 |
366 |
3,55 |
|
0,14 |
0,24 |
414 |
4,02 |
|
0,16 |
0,2 |
276 |
2,23 |
|
0,16 |
0,2 |
300 |
2,43 |
|
0,16 |
0,2 |
336 |
2,72 |
|
0,16 |
0,2 |
366 |
2,96 |
|
0,16 |
0,2 |
414 |
3,35 |
Hình 3.2. Đồ thị đặc tính hoạt động chi tiết chân vịt sạch theo KT
3.1.3. Xây dựng đường đặc tính chân vịt của động cơ ở điều kiện thực tế.
Xây dựng đường đặc tính chân vịt ở ba chế độ tải trọng 100% tải, 110% tải, 85 % tải ở chế độ thực tế.
* Trường hợp 110% tải :
|
Đại lượng |
Đơn vị |
nmin |
nS |
nH |
nmax |
|
Tốc độ quay chân vịt |
v/ph |
224 |
335 |
372 |
383 |
|
Tốc độ quay chân vịt |
v/s |
3,73 |
5,58 |
6,2 |
6,38 |
|
Tốc độ tàu V |
hl/h |
3,2 |
5,2 |
5,8 |
6 |
|
Hệ KQ |
- |
0,012 |
0,012 |
0,012 |
0,012 |
|
Hệ số C = |
- |
0,52 |
0,52 |
0,52 |
0,52 |
|
Công suất đòi hỏi của chân vịt Np = Cn3 |
ml |
36 |
81 |
124 |
127 |
* Trường hợp 100% tải :
|
Đại lượng |
Đơn vị |
nmin |
nS |
nH |
nmax |
|
Tốc độ quay chân vịt |
v/ph |
224 |
335 |
372 |
383 |
|
Tốc độ quay chân vịt |
v/s |
3,73 |
5,58 |
6,2 |
6,38 |
|
Tốc độ tàu V |
hl/h |
3,4 |
5,4 |
5,7 |
6,3 |
|
Hệ KQ |
- |
0,0105 |
0,0105 |
0,0105 |
0,0105 |
|
Hệ số C = |
- |
0,5 |
0,5 |
0,5 |
0,5 |
|
Công suất đòi hỏi của chân vịt Np = Cn3 |
ml |
32 |
78 |
113 |
123 |
* Trường hợp 85 % tải.
|
Đại lượng |
Đơn vị |
nmin |
nS |
nH |
nmax |
|
Tốc độ quay chân vịt |
v/ph |
224 |
335 |
372 |
383 |
|
Tốc độ quay chân vịt |
v/s |
3,73 |
5,58 |
6,2 |
6,38 |
|
Tốc độ tàu V |
hl/h |
3,6 |
5,7 |
6,4 |
6,8 |
|
Hệ KQ |
- |
0,008 |
0,008 |
0,008 |
0,008 |
|
Hệ số C = |
- |
0,467 |
0,467 |
0,467 |
0,467 |
|
Công suất đòi hỏi của chân vịt Np = Cn3 |
ml |
30 |
74 |
96 |
120 |
Hình 3.3. Đường đặc tính công suất chân vịt động cơ thực tế.
Đường 1: chế độ 110% tải, đường 2: chế độ 100% tải, đường 3: 85% tải.
3.1.4. Xây dựng đồ thị vận hành lí thuyết.
Bảng tính xây dựng đưòng công suất động cơ và đường lực lực đẩy chân vịt ở ba chế độ tải trọng.
* Trường hợp 110 % tải.
|
TT |
Các đại lượng và công thức tính |
Đơn vị |
Giá trị các đại lượng cần tính |
|||
|
nmin |
nS |
nH |
nmax |
|||
|
1 |
Tốc độ quay chân vịt n |
v/ph |
378 |
390 |
402 |
414 |
|
2 |
Tốc độ chạy tàu V |
hl/h |
6,3 |
6,8 |
7 |
7,2 |
|
3 |
Giá trị h/s mômen KQ1=f(V,n) |
|
0.0078 |
0.0078 |
0.0078 |
0.0078 |
|
4 |
Giá trị h/s lực đẩy KT1=f(V,n) |
|
0.07 |
0.07 |
0.07 |
0.07 |
|
5 |
rn2D4 |
|
10126 |
10779 |
11452 |
12146 |
|
6 |
Vt = n.D.J1 |
hl/h |
3,4 |
3,69 |
4,6 |
6,5 |
|
7 |
P = (5)KT1 |
KG |
852 |
1086 |
1297 |
1366 |
|
8 |
ml |
122 |
158 |
165 |
181 |
|
* Trường hợp 100% tải:
|
TT |
Các đại lượng và công thức tính |
Đơn vị |
Giá trị các đại lượng cần tính |
|||
|
nmin |
nS |
nH |
nmax |
|||
|
1 |
Tốc độ quay chân vịt n |
v/ph |
378 |
390 |
402 |
414 |
|
2 |
Tốc độ chạy tàu V |
hl/h |
6,5 |
6,9 |
7.2 |
7,4 |
|
3 |
Giá trị h/s mômen KQ1=f(V,n) |
|
0.0076 |
0.0076 |
0.0076 |
0.0076 |
|
4 |
Giá trị h/s lực đẩy KT1=f(V,n) |
|
0.068 |
0.068 |
0.068 |
0.068 |
|
5 |
rn2D4 |
|
10126 |
10779 |
11452 |
12146 |
|
6 |
Vt = n.D.J2 |
hl/h |
4,3 |
4,42 |
6,3 |
6,9 |
|
7 |
P = (5)KT2 |
KG |
67 |
896 |
1092 |
1157 |
|
8 |
ml |
102 |
136 |
157 |
165 |
|
* Trường hợp 85% tải:
|
TT |
Các đại lượng và công thức tính |
Đơn vị |
Giá trị các đại lượng cần tính |
|||
|
nmin |
nS |
nH |
nmax |
|||
|
1 |
Tốc độ quay chân vịt n |
v/ph |
378 |
390 |
402 |
414 |
|
2 |
Tốc độ chạy tàu V |
hl/h |
6,5 |
6,9 |
7,2 |
7,6 |
|
3 |
Giá trị h/s mômen KQ1=f(V,n) |
|
0.0078 |
0.0078 |
0.0078 |
0.0078 |
|
4 |
Giá trị h/s lực đẩy KT1=f(V,n) |
|
0.07 |
0.07 |
0.07 |
0.07 |
|
5 |
rn2D4 |
|
10126 |
10779 |
11452 |
12146 |
|
6 |
Vt = n.D.J3 |
hl/h |
4,62 |
4,78 |
6,7 |
7,56 |
|
7 |
P = (5)KT |
KG |
436 |
645 |
798 |
935 |
|
8 |
ml |
87 |
113 |
134 |
157 |
|
Hình 3.4. Đồ thị vận hành lí thuyết.
3.1.5. Xây dựng đồ thị vận hành thực tế tàu KH – 91806TS.
Bảng tính xây dựng các đường đặc tính lực đẩy P và công suất chân vịt Ne
Trường hợp 110 % tải:
|
TT |
Các đại lượng và công thức tính |
Đơn vị |
Giá trị các đại lượng cần tính |
|||
|
nmin |
nS |
nH |
nmax |
|||
|
1 |
Tốc độ quay chân vịt n |
v/ph |
224 |
335 |
372 |
383 |
|
2 |
Tốc độ chạy tàu V |
hl/h |
3,2 |
5,2 |
5,8 |
6 |
|
3 |
Giá trị h/s mômen KQ1=f(V,n) |
|
0.012 |
0.012 |
0.012 |
0.012 |
|
4 |
Giá trị h/s lực đẩy KT1=f(V,n) |
|
0.0103 |
0.00103 |
0.0103 |
0.0103 |
|
5 |
rn2D4 |
|
10126 |
10779 |
11452 |
12146 |
|
6 |
Vt = n.D.J1 |
hl/h |
3,34 |
3,82 |
4,1 |
4,3 |
|
7 |
P = (5)KT1 |
KG |
395 |
836 |
1129 |
1397 |
|
8 |
ml |
32 |
87 |
118 |
139 |
|
Trường hợp 100 % tải:
|
TT |
Các đại lượng và công thức tính |
Đơn vị |
Giá trị các đại lượng cần tính |
|||
|
nmin |
nS |
nH |
nmax |
|||
|
1 |
Tốc độ quay chân vịt n |
v/ph |
224 |
335 |
372 |
383 |
|
2 |
Tốc độ chạy tàu V |
hl/h |
3,4 |
5,4 |
5,7 |
6,3 |
|
3 |
Giá trị h/s mômen KQ1=f(V,n) |
|
0.0105 |
0.0105 |
0.0105 |
0.0105 |
|
4 |
Giá trị h/s lực đẩy KT1=f(V,n) |
|
0.092 |
0.092 |
0.092 |
0.092 |
|
5 |
rn2D4 |
|
10126 |
10779 |
11452 |
12146 |
|
6 |
Vt = n.D.J2 |
hl/h |
3,7 |
4,2 |
4,84 |
5,7 |
|
7 |
P = (5)KT2 |
KG |
312 |
773 |
1025 |
1196 |
|
8 |
ml |
32 |
85 |
109 |
135 |
|
* Trường hợp 85 % tải:
|
TT |
Các đại lượng và công thức tính |
Đơn vị |
Giá trị các đại lượng cần tính |
|||
|
nmin |
nS |
nH |
nmax |
|||
|
1 |
Tốc độ quay chân vịt n |
v/ph |
224 |
335 |
372 |
383 |
|
2 |
Tốc độ chạy tàu V |
hl/h |
3,6 |
5,7 |
6,4 |
6,8 |
|
3 |
Giá trị h/s mômen KQ1=f(V,n) |
|
0.008 |
0.008 |
0.008 |
0.008 |
|
4 |
Giá trị h/s lực đẩy KT1=f(V,n) |
|
0.076 |
0.076 |
0.076 |
0.076 |
|
5 |
rn2D4 |
|
10126 |
10779 |
11452 |
12146 |
|
6 |
Vt = n.D.J3 |
hl/h |
4,1 |
4,6 |
5,3 |
6,8 |
|
7 |
P = (5)KT3 |
KG |
294 |
695 |
936 |
905 |
|
8 |
ml |
32 |
76 |
96 |
127 |
|
Bảng tính đường công suất động cơ tàu KH – 91806.
|
ncv(v/ph) |
Vt(hl/h) |
KQ |
NP=(KQrn3D5)/11,936 (ml) |
Nđc=NP/hhshdt (ml) |
|
224 |
3.4 |
0.0105 |
38,7 |
43 |
|
335 |
5.4 |
0.0105 |
80,1 |
89.00 |
|
372 |
6.2 |
0.0105 |
98,1 |
109 |
|
383 |
6.5 |
0.0105 |
112,5 |
125 |
Từ bảng tính trên ta xây dựng được đồ thị vận hành tàu thực tế dưới đây:
Hình 3.5. Đồ thị vận hành tàu ở chế độ làm việc thực tế tàu KH – 91806TS
Từ đồ thị vận hành tàu làm việc ở chế độ định mức và thực tế ta gộp hai đồ thị được:
Hình 3.6. Đồ thị vận hành tổng hợp của tàu làm việc định mức và khai thác thực tế.
Trong đó:
1, 1’ - Đường đặc tính công suất chân vịt và lực theo tốc độ quay không đổi tàu khai thác thực tế.
EPS, EPS’ - Đường công suất kéo tàu khai thác thực tế và đường công suất kéo tàu lí thuyết.
R, R’ - Đường cong sức cản tàu thực tế và đường cong sức cản tàu lí thuyết.
3, 3’ - Đường đặc tính công suất động cơ và lực kéo theo tốc độ quay n.
N = f(n) - Đường đặc tính công suất chân vịt N = f(n)
Từ đồ thị vận hành lí thuyết và thực tế tiến hành so sánh phân tích sự thay đổi của các đường đặc tính trên đồ thị.
3.2. XÂY DỰNG ĐỒ THỊ VẬN HÀNH TÀU THỰC TẾ VỚI TÀU KH – 91716TS
3.2.1. Các thông số về tàu và các thông tin chuẩn bị khi thử tàu.
3.2.1.1. Các thông số cơ bản về tàu
Các thông số bản tàu KH – 91716TS
- Chiều dài toàn bộ Ltb = 17,5 m; - Chiều dài thiết kế: Ltk = 15,6 m
- Chiều dài lớn nhất Lmax =17,1 m; - Chiều rộng thiết kế: BTK=5,02 m
- Chiều rộng lớn nhất: Bmax =5,2 m; Chiều cao mạn:H = 2,65m
- Chiều chìm trung bình: Ttb = 1,79 m; Các hệ số đầy
- Hệ số Hệ số dòng theo
- Hệ số dòng hút: t = 0,196 Máy chính: YANMAR - Nhật bản
- Tỉ số truyền hộp giảm tốc: I = 3,45 Số cánh chân vịt z = 3
- Tỉ số mặt đĩa: = 0,5; Đường kính chân vịt D = 1,06 (m)
- Tỉ số bước xoắn: H/D = 0,54 Mật độ mặn: = 104,5 (KG.s2/m2)
- Hiệu suất hộp giảm tốc: Hiệu suất đường trục:=0,97
3.2.1.2. Các thông tin chuẩn bị thử tàu
- Ngày thử tàu:24 – 4-2007
- Nơi thử tàu: CÔNG TY ĐÓNG TÀU SÔNG THUỶ
- Độ sâu: 4m
- Rộng nơi thử:24 m
- Độ ẩm không khí:83%
- Vận tốc gió:cấp 2.
- Vận tốc dòng chảy:bằng 0 (lúc nước tĩnh)
- Vận tốc tàu đo bằng máy định vị vệ tinh loại cầm tay loại Furuno 320 có độ chính xác 0,1%.
- Số vòng quay chân vịt đo bằng thiết bị điện tử cầm tay loại CDT 2000, có độ chính xác 0,02%.
- Số vòng quay chân vịt lớn nhất nmax = 566 v/ph
- Số vòng quay chân vịt nhỏ nhất nmin= 115 v/ph
- Xây dựng đồ thị vận hành tàu ở ba chế độ tải 100% tải, 110% tải, 85% tải
- Bảng giá trị tốc độ tàu và tốc độ chân vịt:
|
chế độ tải trọng |
Đại lượng |
Đơn vị |
nmin |
nS |
nH |
nmax |
|
ncv |
v/ph |
336 |
445 |
534 |
566 |
|
|
110% tải |
V |
hl/h |
2,54 |
4,32 |
5,7 |
6 |
|
100% tải |
V |
hl/h |
2,7 |
4,57 |
5,9 |
6,3 |
|
85% tải |
V |
hl/h |
2,87 |
4,8 |
6,2 |
6,5 |
3.2.2. Xây dựng đường đặc tính chân vịt sạch tàu KH – 91716TS
Dưới đây là bảng tính xây dựng đường đặc tính chân vịt sạch.
|
KQ |
J |
ncv(v/p) |
Tốc độ chạy tàu VP=(nD)J(m/ph) |
|
0,008 |
0,42 |
510 |
7,35 |
|
0,008 |
0,42 |
570 |
8,21 |
|
0,008 |
0,42 |
630 |
9,08 |
|
0,008 |
0,42 |
666 |
9,6 |
|
0,01 |
0,4 |
510 |
7 |
|
0,01 |
0,4 |
570 |
7,83 |
|
0,01 |
0,4 |
630 |
8,65 |
|
0,01 |
0,4 |
666 |
9,14 |
|
0,012 |
0,36 |
510 |
6,3 |
|
0,012 |
0,36 |
570 |
7,04 |
|
0,012 |
0,36 |
630 |
7,78 |
|
0,012 |
0,36 |
666 |
8,23 |
|
0,014 |
0,26 |
510 |
4,55 |
|
0,014 |
0,26 |
570 |
5,08 |
|
0,014 |
0,26 |
630 |
5,62 |
|
0,014 |
0,26 |
666 |
5,94 |
|
0,016 |
0,13 |
510 |
2,27 |
|
0,016 |
0,13 |
570 |
2,54 |
|
0,016 |
0,13 |
630 |
2,81 |
|
0,016 |
0,13 |
666 |
3,165 |
Hình 3.7. Xác định giá trị hệ số KQ của chân vịt thực tế
theo đường đặc tính chân vịt sạch tương ứng.
Xây dựng đặc tính chân vịt chi tiết KT = f(V,n) trên là hệ toạ độ tốc độ chân vịt n và tốc độ tàu V.
|
KT |
J |
ncv (v/ph) |
Tốc độ chân vịt VP = (nD)J (m/ph) |